Re: RTABMAP_ROS with ORBSLAM3
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-ROS-with-ORBSLAM3-tp10153p10177.html
Hi,
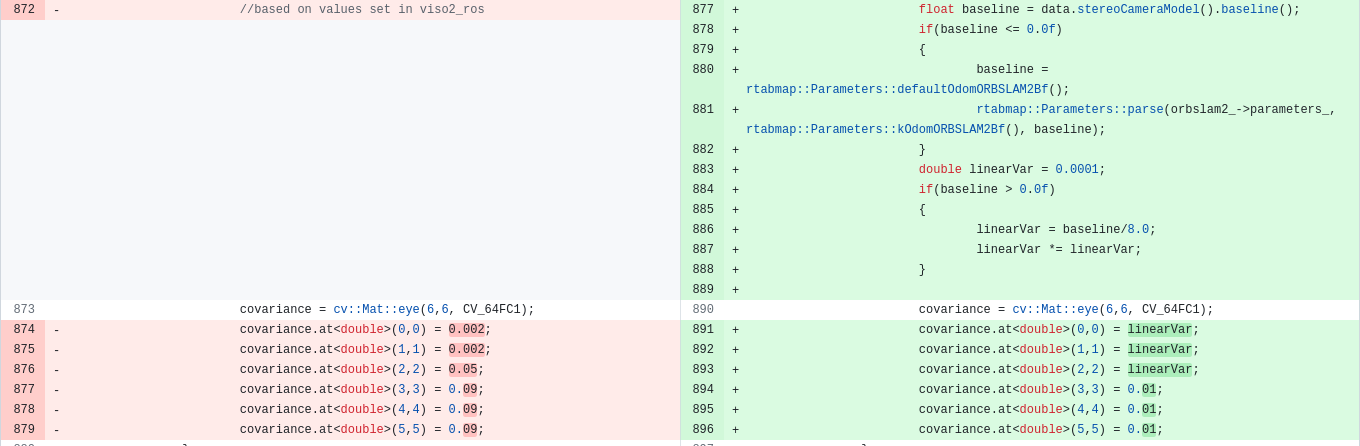
ORBSLAM doesn't output a covariance, so we use a fixed one: https://github.com/introlab/rtabmap/blob/5b810da73b579b2f1c4f3f094024d6f9f29d2a0e/corelib/src/odometry/OdometryORBSLAM3.cpp#L515-L528
Don't remember exactly why we made the change in this commit from previous values hard-coded from viso2 package to know relative to baseline of the camera (though it could make sense if larger baseline may means larger environment with features farther away).
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-ROS-with-ORBSLAM3-tp10153p10177.html
Hi,
ORBSLAM doesn't output a covariance, so we use a fixed one: https://github.com/introlab/rtabmap/blob/5b810da73b579b2f1c4f3f094024d6f9f29d2a0e/corelib/src/odometry/OdometryORBSLAM3.cpp#L515-L528
Don't remember exactly why we made the change in this commit from previous values hard-coded from viso2 package to know relative to baseline of the camera (though it could make sense if larger baseline may means larger environment with features farther away).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |