Re: 2d Map Editor in database viewer save issue
Posted by mrrobot on
URL: http://official-rtab-map-forum.206.s1.nabble.com/2d-Map-Editor-in-database-viewer-save-issue-tp7443p10181.html
Hi
I am facing similar issue with the latest RTABMAP on ROS2 Humble. Below are the database files and corresponding screen shots.
- When mapped
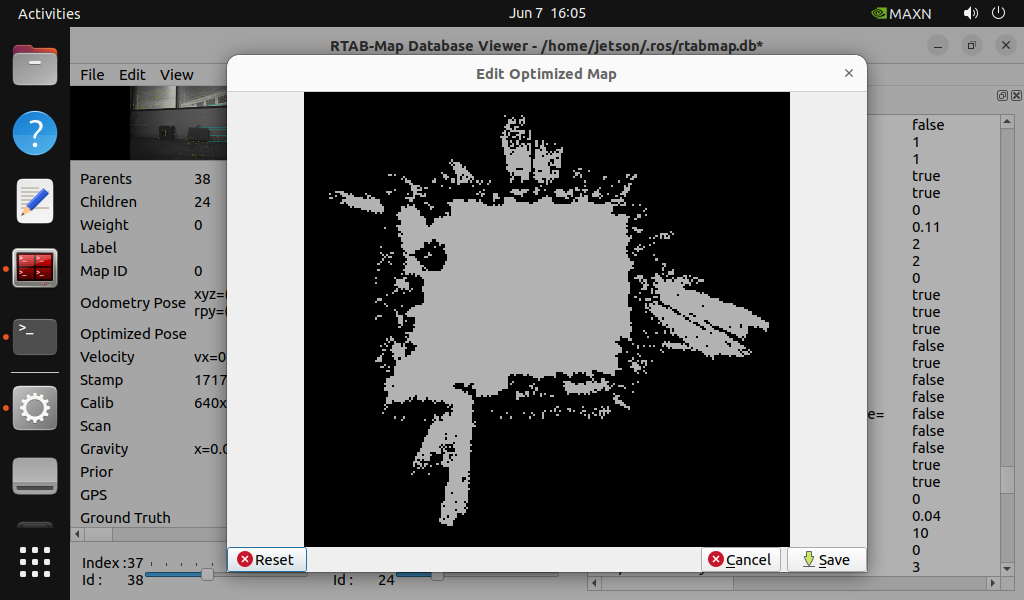
https://drive.google.com/file/d/1EunzWWneflGMYX5TK6O0w41LdpUZXoB_/view?usp=sharing
- When Edited
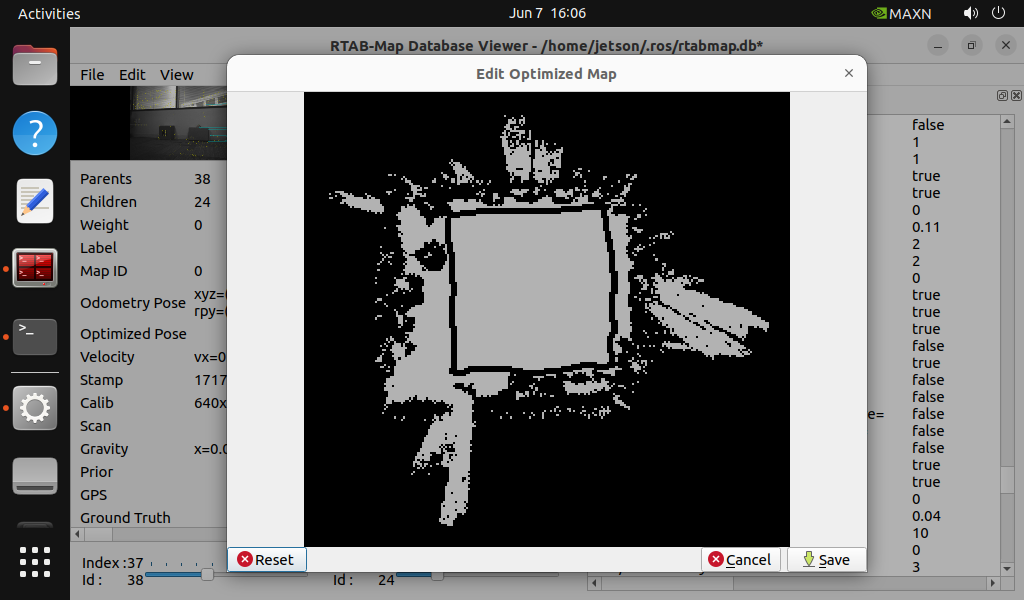
https://drive.google.com/file/d/1T4YJH5CloISOKemO6zf41jgYZnnsUXhT/view?usp=sharing
- When Ran with localization
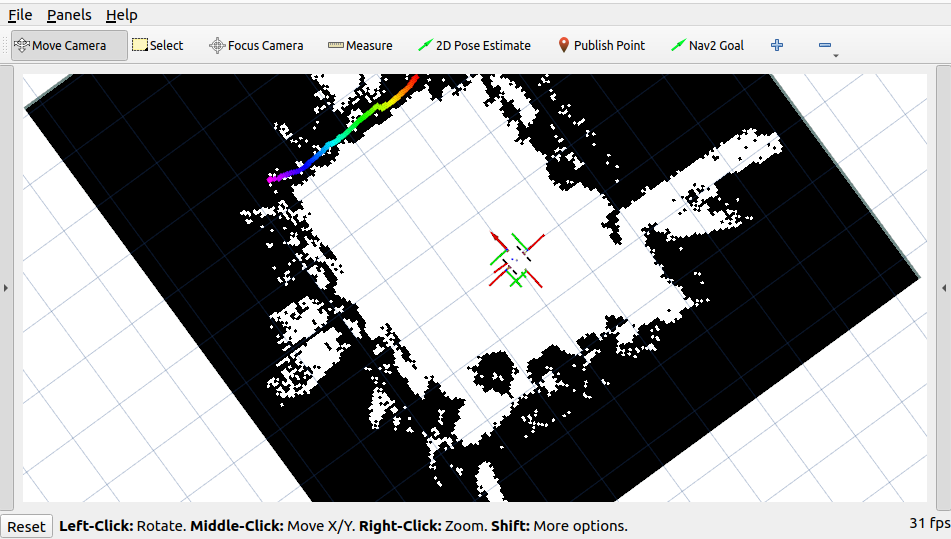
https://drive.google.com/file/d/1BiL7HWuvU8B3YAe-1FBvmX5b1dc8LqHS/view?usp=sharing
launch paramters:
parameters={
'frame_id':'base_footprint',
'subscribe_stereo':True,
'subscribe_odom_info':True,
'wait_imu_to_init':True,
'qos_image':qos,
'qos_imu':qos,
'Reg/Force3DoF':'true',
'Grid/RayTracing':'true',
}
Node(
package='rtabmap_odom', executable='stereo_odometry', output='screen',
parameters=[parameters],
remappings=remappings),
# SLAM mode:
Node(
condition=UnlessCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters],
remappings=remappings,
arguments=['-d']), # This will delete the previous database (~/.ros/rtabmap.db)
# Localization mode:
Node(
condition=IfCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters,
{'Mem/IncrementalMemory':'False',
'Mem/InitWMWithAllNodes':'True'}],
remappings=remappings),
I uploaded db files for all the cases. It used to work good with previous versions. But now suddenly it stopped working. 'Mem/IncrementalMemory':'False', 'Mem/InitWMWithAllNodes':'True'
URL: http://official-rtab-map-forum.206.s1.nabble.com/2d-Map-Editor-in-database-viewer-save-issue-tp7443p10181.html
Hi
I am facing similar issue with the latest RTABMAP on ROS2 Humble. Below are the database files and corresponding screen shots.
- When mapped
https://drive.google.com/file/d/1EunzWWneflGMYX5TK6O0w41LdpUZXoB_/view?usp=sharing
- When Edited
https://drive.google.com/file/d/1T4YJH5CloISOKemO6zf41jgYZnnsUXhT/view?usp=sharing
- When Ran with localization
https://drive.google.com/file/d/1BiL7HWuvU8B3YAe-1FBvmX5b1dc8LqHS/view?usp=sharing
launch paramters:
parameters={
'frame_id':'base_footprint',
'subscribe_stereo':True,
'subscribe_odom_info':True,
'wait_imu_to_init':True,
'qos_image':qos,
'qos_imu':qos,
'Reg/Force3DoF':'true',
'Grid/RayTracing':'true',
}
Node(
package='rtabmap_odom', executable='stereo_odometry', output='screen',
parameters=[parameters],
remappings=remappings),
# SLAM mode:
Node(
condition=UnlessCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters],
remappings=remappings,
arguments=['-d']), # This will delete the previous database (~/.ros/rtabmap.db)
# Localization mode:
Node(
condition=IfCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters,
{'Mem/IncrementalMemory':'False',
'Mem/InitWMWithAllNodes':'True'}],
remappings=remappings),
I uploaded db files for all the cases. It used to work good with previous versions. But now suddenly it stopped working. 'Mem/IncrementalMemory':'False', 'Mem/InitWMWithAllNodes':'True'
| Free forum by Nabble | Edit this page |