odometry error
Posted by samim17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/odometry-error-tp10211.html
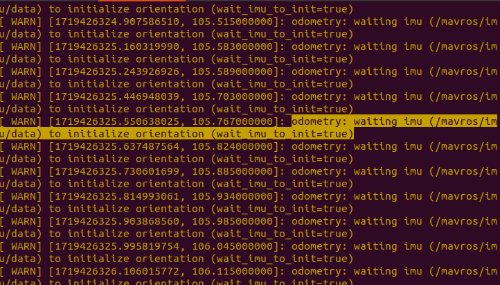
I have followed this https://github.com/matlabbe/rtabmap_drone_example github to simulate rtab.But when I run slam.launch I get the following error : odometry: waiting imu (/mavros/imu/data) to initialize orientation (wait_imu_to_init=true)
URL: http://official-rtab-map-forum.206.s1.nabble.com/odometry-error-tp10211.html
I have followed this https://github.com/matlabbe/rtabmap_drone_example github to simulate rtab.But when I run slam.launch I get the following error : odometry: waiting imu (/mavros/imu/data) to initialize orientation (wait_imu_to_init=true)
| Free forum by Nabble | Edit this page |