RTAB Map with ModalAI Starling 2
Posted by MatWac on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-with-ModalAI-Starling-2-tp10269.html
Hello!
I am trying to implement RTAB-Map on my Starling 2 drone using the rtabmap_drone_example, but I am facing some difficulties.
Initially, I attempted to use all the sensors to create a good map, but it didn't work. So, I tried using only the ToF (Time of Flight) sensor and its PointCloud.
I had to run RTAB-Map in a Docker container due to the numerous libraries that I can't use directly on the drone.
First, I created a node that publishes the data for RTAB-Map with the correct information, taking data from the mpa_to_ros node published by the drone. This runs on my drone.
mpa_to_ros_interface.py :
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Imu, Image, CameraInfo, PointCloud2
from nav_msgs.msg import Odometry
class MpaToRosInterface(object):
def __init__(self):
rospy.init_node('mpa_to_ros_interface')
self.tof_pc_pub = rospy.Publisher('/drone/tof_pc/pc', PointCloud2, queue_size=1000)
self.odometry_pub = rospy.Publisher('/drone/odometry', Odometry, queue_size=1000)
rospy.Subscriber("/tof_pc", PointCloud2, self.tof_pc_callback)
rospy.Subscriber("/qvio/odometry", Odometry, self.odometry_callback)
def tof_pc_callback(self, data):
data.header.frame_id = "tof_link"
data.header.stamp = rospy.Time.now()
self.tof_pc_pub.publish(data)
def odometry_callback(self, data):
data.header.frame_id = "odom"
data.header.stamp = rospy.Time.now()
self.odometry_pub.publish(data)
def main():
mpa_to_ros_interface = MpaToRosInterface()
rospy.spin()
if __name__ == '__main__':
main()
mpa_to_ros_tf_boradcast.py :
#!/usr/bin/env python
import rospy
import tf
from nav_msgs.msg import Odometry
def handle_odom(msg):
br = tf.TransformBroadcaster()
current_time = rospy.Time.now()
# Extract the position and orientation from the odometry message
position = msg.pose.pose.position
orientation = msg.pose.pose.orientation
# Broadcast the transform from odom to base_link
br.sendTransform((position.x, position.y, position.z),
(orientation.x, orientation.y, orientation.z, orientation.w),
current_time,
"odom",
"map")
def broadcast_static_transforms():
br = tf.TransformBroadcaster()
current_time = rospy.Time.now()
br.sendTransform((0.0, 0.0, 0.0),
tf.transformations.quaternion_from_euler(0, 0, 0),
current_time,
"base_link",
"odom")
# Transform from base_link to imu_link
br.sendTransform((0.0295, -0.0065, -0.016),
tf.transformations.quaternion_from_euler(0, 0, 0),
current_time,
"imu_link",
"base_link")
# Transform from base_link to tof_link
br.sendTransform((0.066, 0.009, -0.012),
tf.transformations.quaternion_from_euler(0, 1.5708, 3.1416),
current_time,
"tof_link",
"base_link")
# Transform from base_link to hires_link
br.sendTransform((0.066, 0.009, -0.012),
tf.transformations.quaternion_from_euler(0, 1.5708, 3.1416),
current_time,
"hires_link",
"base_link")
# Transform from imu_link to tracking_front_link
br.sendTransform((0.037, 0.000, 0.0006),
tf.transformations.quaternion_from_euler(0, 1.5708, 1.5708),
current_time,
"tracking_front_link",
"imu_link")
# Transform from imu_link to tracking_down_link
br.sendTransform((-0.08825, -0.0045, 0.00269),
tf.transformations.quaternion_from_euler(0, 0, 3.1416),
current_time,
"tracking_down_link",
"imu_link")
def main():
rospy.init_node('mpa_to_ros_tf_broadcast')
rospy.Subscriber('/drone/odometry', Odometry, handle_odom)
rate = rospy.Rate(20.0)
while not rospy.is_shutdown():
broadcast_static_transforms()
rate.sleep()
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
pass
mavros.launch :
<?xml version="1.0"?>
<launch>
<node name="voxl_mpa_to_ros_node" type="voxl_mpa_to_ros_node" pkg="voxl_mpa_to_ros" output="screen" />
<node name="mpa_to_ros_interface" type="mpa_to_ros_interface.py" pkg="mpa_to_ros_interface" output="screen" />
<node name="mpa_to_ros_tf_broadcast" type="mpa_to_ros_tf_broadcast.py" pkg="mpa_to_ros_interface" output="screen" />
<arg name="fcu_url" default="udp://127.0.0.1:14551@:14551" />
<arg name="gcs_url" default="" />
<arg name="tgt_system" default="$(env PX4_SYS_ID)" />
<arg name="tgt_component" default="1" />
<arg name="log_output" default="screen" />
<arg name="fcu_protocol" default="v2.0" />
<arg name="respawn_mavros" default="false" />
<include file="$(find mavros)/launch/node.launch">
<arg name="pluginlists_yaml" value="$(find mavros)/launch/px4_pluginlists.yaml" />
<arg name="config_yaml" value="$(find mavros)/launch/px4_config.yaml" />
<arg name="fcu_url" value="$(arg fcu_url)" />
<arg name="gcs_url" value="$(arg gcs_url)" />
<arg name="tgt_system" value="$(arg tgt_system)" />
<arg name="tgt_component" value="$(arg tgt_component)" />
<arg name="log_output" value="$(arg log_output)" />
<arg name="fcu_protocol" value="$(arg fcu_protocol)" />
<arg name="respawn_mavros" default="$(arg respawn_mavros)" />
</include>
</launch>
And this is the launchfile to run rtabmap on docker :
<?xml version="1.0"?>
<launch>
<arg name="localization" default="false"/>
<arg name="rtabmap_viz" default="true"/>
<arg name="ground_truth" default="false"/>
<arg if="$(arg localization)" name="pre_args" default=""/>
<arg unless="$(arg localization)" name="pre_args" default="-d"/>
<remap from="/rtabmap/move_base" to="/move_base"/>
<include file="$(find rtabmap_launch)/launch/rtabmap.launch">
<arg name="subscribe_rgbd" default="false"/>
<arg name="depth" default="false"/>
<arg name="subscribe_scan_cloud" default="true"/>
<arg name="visual_odometry" default="false"/>
<arg name="localization" value="$(arg localization)"/>
<arg name="args" value="$(arg pre_args) --delete_db_on_start --Optimizer/GravitySigma 0.1 --Vis/FeatureType 10 --Kp/DetectorStrategy 10 --Grid/FromDepth false --Grid/MapFrameProjection true --NormalsSegmentation false --Grid/MaxGroundHeight 0.2 --Grid/MaxObstacleHeight 2 --Grid/3D true --Grid/Sensor 0 --Grid/RangeMax 0"/>
<arg name="rtabmap_viz" value="$(arg rtabmap_viz)"/>
<arg name="frame_id" value="base_link"/>
<arg name="odom_frame_id" value="odom"/>
<arg name="publish_tf_odom" default="false"/>
<arg name="odom_topic" value="/drone/odometry"/>
<arg name="scan_cloud_topic" value="/drone/tof_pc/pc"/>
<arg name="imu_topic" value="/drone/imu/data"/>
<arg name="wait_imu_to_init" value="true"/>
<arg name="approx_sync" value="true"/>
<arg name="approx_sync_max_interval" value="0.03"/>
<arg if="$(arg ground_truth)" name="ground_truth_frame_id" value="world"/>
<arg if="$(arg ground_truth)" name="ground_truth_base_frame_id" value="base_link_gt"/>
<arg name="sync_queue_size" default="100"/>
</include>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="odom" to="/drone/odometry"/>
<remap from="camera_cloud" to="/drone/tof_pc/pc"/>
<rosparam file="$(find rtabmap_drone)/param/costmap_common_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_drone)/param/costmap_common_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find rtabmap_drone)/param/global_costmap_params.yaml" command="load"/>
<rosparam file="$(find rtabmap_drone)/param/local_costmap_params.yaml" command="load"/>
<rosparam file="$(find rtabmap_drone)/param/base_local_planner_params.yaml" command="load"/>
</node>
<node name="empty_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_empty">
</node>
<node name="marked_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_marked" />
</launch>
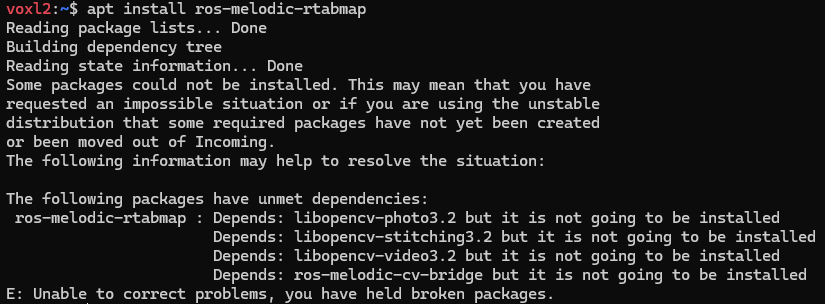
My nodes on the drone seem to work well, but when I launch RTAB-Map, I get these messages:
voxl2:~$ ./rtabmap_launch.sh
... logging to /root/.ros/log/23764bba-48ea-11ef-a0bf-00c0cab3a54a/roslaunch-m0054-1.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://m0054:43045/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rtabmap/
* /rtabmap/rtabmap_viz/
PARAMETERS
* /empty_voxels_markers/cell_type: 0
* /move_base/DWAPlannerROS/acc_lim_theta: 3
* /move_base/DWAPlannerROS/acc_lim_trans: 1.5
* /move_base/DWAPlannerROS/acc_lim_x: 1.5
* /move_base/DWAPlannerROS/acc_lim_y: 1.5
* /move_base/DWAPlannerROS/forward_point_distance: 0.1
* /move_base/DWAPlannerROS/global_frame_id: odom
* /move_base/DWAPlannerROS/goal_distance_bias: 10
* /move_base/DWAPlannerROS/latch_xy_goal_tolerance: False
* /move_base/DWAPlannerROS/max_scaling_factor: 0.2
* /move_base/DWAPlannerROS/max_vel_theta: 1
* /move_base/DWAPlannerROS/max_vel_trans: 0.2
* /move_base/DWAPlannerROS/max_vel_x: 0.2
* /move_base/DWAPlannerROS/max_vel_y: 0.1
* /move_base/DWAPlannerROS/min_vel_theta: 0
* /move_base/DWAPlannerROS/min_vel_trans: 0.01
* /move_base/DWAPlannerROS/min_vel_x: -0.01
* /move_base/DWAPlannerROS/min_vel_y: -0.1
* /move_base/DWAPlannerROS/occdist_scale: 0.08
* /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05
* /move_base/DWAPlannerROS/path_distance_bias: 64
* /move_base/DWAPlannerROS/publish_cost_grid_pc: True
* /move_base/DWAPlannerROS/publish_traj_pc: True
* /move_base/DWAPlannerROS/scaling_speed: 0.25
* /move_base/DWAPlannerROS/sim_time: 4
* /move_base/DWAPlannerROS/stop_time_buffer: 0.2
* /move_base/DWAPlannerROS/theta_stopped_vel: 0.01
* /move_base/DWAPlannerROS/trans_stopped_vel: 0.01
* /move_base/DWAPlannerROS/vth_samples: 20
* /move_base/DWAPlannerROS/vx_samples: 6
* /move_base/DWAPlannerROS/vy_samples: 6
* /move_base/DWAPlannerROS/xy_goal_tolerance: 0.3
* /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.5
* /move_base/NavfnROS/allow_unknown: True
* /move_base/base_local_planner: dwa_local_planner...
* /move_base/controller_frequency: 10.0
* /move_base/global_costmap/controller_patience: 2.0
* /move_base/global_costmap/cost_scaling_factor: 1.5
* /move_base/global_costmap/footprint: [[0.16, 0.16], [-...
* /move_base/global_costmap/footprint_padding: 0.05
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/inflation_layer/inflate_unkown: True
* /move_base/global_costmap/inflation_radius: 1.5
* /move_base/global_costmap/obstacle_range: 3.0
* /move_base/global_costmap/plugins: [{'name': 'static...
* /move_base/global_costmap/publish_frequency: 1
* /move_base/global_costmap/raytrace_range: 3.5
* /move_base/global_costmap/robot_base_frame: base_link
* /move_base/global_costmap/robot_radius: 0.32
* /move_base/global_costmap/static_map: True
* /move_base/global_costmap/transform_tolerance: 1
* /move_base/global_costmap/update_frequency: 1
* /move_base/local_costmap/controller_patience: 2.0
* /move_base/local_costmap/cost_scaling_factor: 1.5
* /move_base/local_costmap/footprint: [[0.16, 0.16], [-...
* /move_base/local_costmap/footprint_padding: 0.05
* /move_base/local_costmap/global_frame: map
* /move_base/local_costmap/height: 4
* /move_base/local_costmap/inflation_radius: 1.5
* /move_base/local_costmap/obstacle_range: 3.0
* /move_base/local_costmap/plugins: [{'name': 'voxel_...
* /move_base/local_costmap/publish_frequency: 2.0
* /move_base/local_costmap/raytrace_range: 3.5
* /move_base/local_costmap/resolution: 0.05
* /move_base/local_costmap/robot_base_frame: base_link
* /move_base/local_costmap/robot_radius: 0.32
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 5.0
* /move_base/local_costmap/voxel_layer/3d_cloud/clearing: True
* /move_base/local_costmap/voxel_layer/3d_cloud/data_type: PointCloud2
* /move_base/local_costmap/voxel_layer/3d_cloud/marking: True
* /move_base/local_costmap/voxel_layer/3d_cloud/max_obstacle_height: 1000
* /move_base/local_costmap/voxel_layer/3d_cloud/min_obstacle_height: -1000
* /move_base/local_costmap/voxel_layer/3d_cloud/topic: /camera_cloud
* /move_base/local_costmap/voxel_layer/enabled: True
* /move_base/local_costmap/voxel_layer/footprint_clearing_enabled: False
* /move_base/local_costmap/voxel_layer/observation_sources: 3d_cloud
* /move_base/local_costmap/voxel_layer/publish_voxel_map: True
* /move_base/local_costmap/voxel_layer/z_resolution: 0.05
* /move_base/local_costmap/voxel_layer/z_voxels: 9
* /move_base/local_costmap/width: 4
* /move_base/planner_frequency: 1
* /rosdistro: noetic
* /rosversion: 1.16.0
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: base_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/latch: False
* /rtabmap/rtabmap/loc_thr: 0.0
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id: odom
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: False
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: True
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/sync_queue_size: 100
* /rtabmap/rtabmap/topic_queue_size: 1
* /rtabmap/rtabmap/use_action_for_goal: True
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap_viz/approx_sync: True
* /rtabmap/rtabmap_viz/frame_id: base_link
* /rtabmap/rtabmap_viz/odom_frame_id: odom
* /rtabmap/rtabmap_viz/subscribe_depth: False
* /rtabmap/rtabmap_viz/subscribe_rgb: False
* /rtabmap/rtabmap_viz/subscribe_rgbd: False
* /rtabmap/rtabmap_viz/subscribe_scan: False
* /rtabmap/rtabmap_viz/subscribe_scan_cloud: True
* /rtabmap/rtabmap_viz/subscribe_scan_descriptor: False
* /rtabmap/rtabmap_viz/subscribe_stereo: False
* /rtabmap/rtabmap_viz/sync_queue_size: 100
* /rtabmap/rtabmap_viz/topic_queue_size: 1
* /rtabmap/rtabmap_viz/wait_for_transform_duration: 0.2
NODES
/
empty_voxels_markers (rtabmap_costmap_plugins/voxel_markers)
marked_voxels_markers (rtabmap_costmap_plugins/voxel_markers)
move_base (move_base/move_base)
/rtabmap/
rtabmap (rtabmap_slam/rtabmap)
rtabmap_viz (rtabmap_viz/rtabmap_viz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rtabmap-1]: started with pid [50]
process[rtabmap/rtabmap_viz-2]: started with pid [51]
process[move_base-3]: started with pid [52]
process[empty_voxels_markers-4]: started with pid [53]
process[marked_voxels_markers-5]: started with pid [54]
[ WARN] [1721735598.473160994]: global_costmap: Pre-Hydro parameter "static_map" unused since "plugins" is provided
[ INFO] [1721735598.475875560]: global_costmap: Using plugin "static_layer"
[ INFO] [1721735598.490125923]: Requesting the map...
[ INFO] [1721735598.891798017]: Starting node...
[ INFO] [1721735598.931406220]: Initializing nodelet with 8 worker threads.
[ INFO] [1721735598.972168456]: Starting node...
[ INFO] [1721735599.143035720]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1721735599.143094104]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1721735599.143114052]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1721735599.143124937]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1721735599.143141238]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1721735599.143164207]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1721735599.143192852]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1721735599.143204622]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1721735599.143438054]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1721735599.165719675]: rtabmap: frame_id = base_link
[ INFO] [1721735599.165766288]: rtabmap: odom_frame_id = odom
[ INFO] [1721735599.166146956]: rtabmap: map_frame_id = map
[ INFO] [1721735599.166185497]: rtabmap: log_to_rosout_level = 4
[ INFO] [1721735599.166213933]: rtabmap: initial_pose =
[ INFO] [1721735599.166227527]: rtabmap: use_action_for_goal = true
[ INFO] [1721735599.166248932]: rtabmap: tf_delay = 0.050000
[ INFO] [1721735599.166263515]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1721735599.166278984]: rtabmap: odom_sensor_sync = false
[ INFO] [1721735599.166294452]: rtabmap: pub_loc_pose_only_when_localizing = false
[ INFO] [1721735599.167077922]: rtabmap: gen_scan = false
[ INFO] [1721735599.167112244]: rtabmap: gen_depth = false
[ INFO] [1721735599.167549681]: rtabmap: scan_cloud_max_points = 0
[ INFO] [1721735599.167576763]: rtabmap: scan_cloud_is_2d = false
[ INFO] [1721735599.355361574]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1721735599.355736825]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ WARN] (2024-07-23 11:53:19.570) Parameters.cpp:1161::parseArguments() Parameter migration from "Grid/FromDepth" to "Grid/Sensor" (value=false).
[ INFO] [1721735599.570785526]: Update RTAB-Map parameter "Grid/3D"="true" from arguments
[ INFO] [1721735599.570828338]: Update RTAB-Map parameter "Grid/MapFrameProjection"="true" from arguments
[ INFO] [1721735599.570854639]: Update RTAB-Map parameter "Grid/MaxGroundHeight"="0.2" from arguments
[ INFO] [1721735599.570881878]: Update RTAB-Map parameter "Grid/MaxObstacleHeight"="2" from arguments
[ INFO] [1721735599.570895055]: Update RTAB-Map parameter "Grid/RangeMax"="0" from arguments
[ INFO] [1721735599.570905315]: Update RTAB-Map parameter "Grid/Sensor"="0" from arguments
[ INFO] [1721735599.570913440]: Update RTAB-Map parameter "Kp/DetectorStrategy"="10" from arguments
[ INFO] [1721735599.570922554]: Update RTAB-Map parameter "Optimizer/GravitySigma"="0.1" from arguments
[ INFO] [1721735599.570935783]: Update RTAB-Map parameter "Vis/FeatureType"="10" from arguments
[ INFO] [1721735599.721372272]: Setting "Icp/PointToPlaneRadius" parameter to 0 (default 0.000000) as "subscribe_scan_cloud" is true.
[ INFO] [1721735599.722403236]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1721735599.722782393]: rtabmap: Using database from "/root/.ros/rtabmap.db" (0 MB).
[ INFO] [1721735600.217641220]: rtabmap: Database version = "0.21.5".
[ INFO] [1721735600.218029075]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[ INFO] [1721735600.238467518]: /rtabmap/rtabmap: subscribe_depth = false
[ INFO] [1721735600.238526788]: /rtabmap/rtabmap: subscribe_rgb = false
[ INFO] [1721735600.238547673]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1721735600.238561162]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1721735600.238576630]: /rtabmap/rtabmap: subscribe_sensor_data = false
[ INFO] [1721735600.238606890]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1721735600.238620431]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1721735600.238633608]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1721735600.238651680]: /rtabmap/rtabmap: subscribe_scan_cloud = true
[ INFO] [1721735600.238667670]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1721735600.238677669]: /rtabmap/rtabmap: topic_queue_size = 1
[ INFO] [1721735600.238693867]: /rtabmap/rtabmap: sync_queue_size = 100
[ INFO] [1721735600.238872821]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1721735600.241093077]: Setup scan callback
[ INFO] [1721735600.250247690]:
/rtabmap/rtabmap subscribed to:
/drone/tof_pc/pc
[ WARN] [1721735600.253312978]: There is no image subscription, bag-of-words loop closure detection will be disabled...
[ WARN] [1721735600.253397194]: Setting Kp/MaxFeatures=-1 (bag-of-words disabled)
[ WARN] [1721735600.253422298]: Setting Reg/Strategy=1 (ICP)
[ WARN] [1721735600.253440318]: Setting "RGBD/ProximityPathMaxNeighbors" parameter to 1 (default 0) as "subscribe_scan_cloud" is true and "Reg/Strategy" uses ICP. To disable, set "RGBD/ProximityPathMaxNeighbors" to 0. To suppress this warning, add
[ INFO] [1721735600.296892818]: rtabmap_viz: Using configuration from "/root/.ros/rtabmap_gui.ini"
[ INFO] [1721735600.422576840]: rtabmap 0.21.5 started...
[ WARN] [1721735600.515297370]: Grid map is empty! (local maps=1)
[ INFO] [1721735600.516336979]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0306s, RTAB-Map=0.0904s, Maps update=0.0018s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735601.472010518]: Grid map is empty! (local maps=1)
[ INFO] [1721735601.472310094]: rtabmap (2): Rate=1.00s, Limit=0.000s, Conversion=0.0290s, RTAB-Map=0.0461s, Maps update=0.0003s pub=0.0004s (local map=1, WM=1)
[ WARN] [1721735602.548561794]: Grid map is empty! (local maps=1)
[ INFO] [1721735602.549918948]: rtabmap (3): Rate=1.00s, Limit=0.000s, Conversion=0.0341s, RTAB-Map=0.0235s, Maps update=0.0032s pub=0.0014s (local map=1, WM=1)
[ WARN] [1721735603.562147317]: Grid map is empty! (local maps=1)
[ INFO] [1721735603.562502933]: rtabmap (4): Rate=1.00s, Limit=0.000s, Conversion=0.0285s, RTAB-Map=0.0382s, Maps update=0.0012s pub=0.0004s (local map=1, WM=1)
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ WARN] [1721735604.647968496]: Grid map is empty! (local maps=1)
[ INFO] [1721735604.648631345]: rtabmap (5): Rate=1.00s, Limit=0.000s, Conversion=0.0230s, RTAB-Map=0.0279s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735605.750366819]: Grid map is empty! (local maps=1)
[ INFO] [1721735605.750833110]: rtabmap (6): Rate=1.00s, Limit=0.000s, Conversion=0.0313s, RTAB-Map=0.0297s, Maps update=0.0003s pub=0.0006s (local map=1, WM=1)
[ INFO] [1721735606.309773620]: rtabmap_viz: Reading parameters from the ROS server...
[ INFO] [1721735606.669859919]: rtabmap_viz: Parameters read = 377
[ INFO] [1721735606.669924761]: rtabmap_viz: Parameters successfully read.
[ WARN] [1721735606.848397740]: Grid map is empty! (local maps=1)
[ INFO] [1721735606.848831011]: rtabmap (7): Rate=1.00s, Limit=0.000s, Conversion=0.0299s, RTAB-Map=0.0260s, Maps update=0.0021s pub=0.0005s (local map=1, WM=1)
[ INFO] [1721735607.632474048]: /rtabmap/rtabmap_viz: subscribe_depth = false
[ INFO] [1721735607.632528786]: /rtabmap/rtabmap_viz: subscribe_rgb = false
[ INFO] [1721735607.632548733]: /rtabmap/rtabmap_viz: subscribe_stereo = false
[ INFO] [1721735607.632567743]: /rtabmap/rtabmap_viz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1721735607.632585139]: /rtabmap/rtabmap_viz: subscribe_sensor_data = false
[ INFO] [1721735607.632601805]: /rtabmap/rtabmap_viz: subscribe_odom_info = false
[ INFO] [1721735607.632619982]: /rtabmap/rtabmap_viz: subscribe_user_data = false
[ INFO] [1721735607.632637950]: /rtabmap/rtabmap_viz: subscribe_scan = false
[ INFO] [1721735607.632653887]: /rtabmap/rtabmap_viz: subscribe_scan_cloud = true
[ INFO] [1721735607.632685397]: /rtabmap/rtabmap_viz: subscribe_scan_descriptor = false
[ INFO] [1721735607.632873153]: /rtabmap/rtabmap_viz: topic_queue_size = 1
[ INFO] [1721735607.633012056]: /rtabmap/rtabmap_viz: sync_queue_size = 100
[ INFO] [1721735607.633132730]: /rtabmap/rtabmap_viz: approx_sync = true
[ INFO] [1721735607.633300955]: Setup scan callback
[ INFO] [1721735607.635796417]:
/rtabmap/rtabmap_viz subscribed to:
/drone/tof_pc/pc
[ INFO] [1721735607.637549605]: rtabmap_viz started.
[ WARN] [1721735607.842693916]: Grid map is empty! (local maps=1)
[ INFO] [1721735607.843286871]: rtabmap (8): Rate=1.00s, Limit=0.000s, Conversion=0.0225s, RTAB-Map=0.0241s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735608.844783757]: Grid map is empty! (local maps=1)
[ INFO] [1721735608.850908874]: rtabmap (9): Rate=1.00s, Limit=0.000s, Conversion=0.0185s, RTAB-Map=0.0252s, Maps update=0.0007s pub=0.0061s (local map=1, WM=1)
[ WARN] [1721735609.898011464]: Grid map is empty! (local maps=1)
[ INFO] [1721735609.899019253]: rtabmap (10): Rate=1.00s, Limit=0.000s, Conversion=0.0215s, RTAB-Map=0.0725s, Maps update=0.0011s pub=0.0010s (local map=1, WM=1)
[ WARN] [1721735610.950040302]: Grid map is empty! (local maps=1)
[ INFO] [1721735610.952081609]: rtabmap (11): Rate=1.00s, Limit=0.000s, Conversion=0.0518s, RTAB-Map=0.0300s, Maps update=0.0004s pub=0.0017s (local map=1, WM=1)
[ INFO] [1721735610.952485350]: rtabmap: paused!
[ INFO] [1721735610.960550060]: rtabmap: resumed!
[ WARN] (2024-07-23 11:53:31.961) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 1 (Rtabmap/MaxRepublished=2)
[ WARN] [1721735611.966008096]: Grid map is empty! (local maps=1)
[ INFO] [1721735611.967449834]: rtabmap (12): Rate=1.00s, Limit=0.000s, Conversion=0.0367s, RTAB-Map=0.0405s, Maps update=0.0002s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735612.949552396]: Grid map is empty! (local maps=1)
[ INFO] [1721735612.951225952]: rtabmap (13): Rate=1.00s, Limit=0.000s, Conversion=0.0286s, RTAB-Map=0.0289s, Maps update=0.0010s pub=0.0016s (local map=1, WM=1)
[ WARN] [1721735613.950026080]: Grid map is empty! (local maps=1)
[ INFO] [1721735613.950752314]: rtabmap (14): Rate=1.00s, Limit=0.000s, Conversion=0.0291s, RTAB-Map=0.0285s, Maps update=0.0003s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735615.096640665]: Grid map is empty! (local maps=1)
[ INFO] [1721735615.097455595]: rtabmap (15): Rate=1.00s, Limit=0.000s, Conversion=0.0165s, RTAB-Map=0.0729s, Maps update=0.0012s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735616.147982481]: Grid map is empty! (local maps=1)
[ INFO] [1721735616.149015115]: rtabmap (16): Rate=1.00s, Limit=0.000s, Conversion=0.0268s, RTAB-Map=0.0270s, Maps update=0.0018s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735617.266636259]: Grid map is empty! (local maps=1)
[ INFO] [1721735617.267710715]: rtabmap (17): Rate=1.00s, Limit=0.000s, Conversion=0.0275s, RTAB-Map=0.0418s, Maps update=0.0003s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735618.350049035]: Grid map is empty! (local maps=1)
[ INFO] [1721735618.350799280]: rtabmap (18): Rate=1.00s, Limit=0.000s, Conversion=0.0273s, RTAB-Map=0.0287s, Maps update=0.0013s pub=0.0008s (local map=1, WM=1)
[ WARN] [1721735619.451121010]: Grid map is empty! (local maps=1)
[ INFO] [1721735619.452286662]: rtabmap (19): Rate=1.00s, Limit=0.000s, Conversion=0.0429s, RTAB-Map=0.0294s, Maps update=0.0009s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735620.458261696]: Grid map is empty! (local maps=1)
[ INFO] [1721735620.459339225]: rtabmap (20): Rate=1.00s, Limit=0.000s, Conversion=0.0156s, RTAB-Map=0.0363s, Maps update=0.0010s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735621.551124077]: Grid map is empty! (local maps=1)
[ INFO] [1721735621.552487642]: rtabmap (21): Rate=1.00s, Limit=0.000s, Conversion=0.0438s, RTAB-Map=0.0307s, Maps update=0.0009s pub=0.0014s (local map=1, WM=1)
[ WARN] [1721735622.544289416]: Grid map is empty! (local maps=1)
[ INFO] [1721735622.545402622]: rtabmap (22): Rate=1.00s, Limit=0.000s, Conversion=0.0229s, RTAB-Map=0.0232s, Maps update=0.0009s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735623.549656693]: Grid map is empty! (local maps=1)
[ INFO] [1721735623.551814409]: rtabmap (23): Rate=1.00s, Limit=0.000s, Conversion=0.0121s, RTAB-Map=0.0262s, Maps update=0.0022s pub=0.0021s (local map=1, WM=1)
[ WARN] [1721735624.645383310]: Grid map is empty! (local maps=1)
[ INFO] [1721735624.646384644]: rtabmap (24): Rate=1.00s, Limit=0.000s, Conversion=0.0211s, RTAB-Map=0.0254s, Maps update=0.0002s pub=0.0010s (local map=1, WM=1)
[ WARN] [1721735625.749224114]: Grid map is empty! (local maps=1)
[ INFO] [1721735625.750026598]: rtabmap (25): Rate=1.00s, Limit=0.000s, Conversion=0.0098s, RTAB-Map=0.0265s, Maps update=0.0009s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735626.858550931]: Grid map is empty! (local maps=1)
[ INFO] [1721735626.859247115]: rtabmap (26): Rate=1.00s, Limit=0.000s, Conversion=0.0460s, RTAB-Map=0.0307s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735627.996090071]: Grid map is empty! (local maps=1)
[ INFO] [1721735627.997219424]: rtabmap (27): Rate=1.00s, Limit=0.000s, Conversion=0.0378s, RTAB-Map=0.0721s, Maps update=0.0002s pub=0.0018s (local map=1, WM=1)
[ WARN] [1721735628.947040165]: Grid map is empty! (local maps=1)
[ INFO] [1721735628.948890076]: rtabmap (28): Rate=1.00s, Limit=0.000s, Conversion=0.0149s, RTAB-Map=0.0246s, Maps update=0.0011s pub=0.0019s (local map=1, WM=1)
[ WARN] [1721735630.049006981]: Grid map is empty! (local maps=1)
[ INFO] [1721735630.050534816]: rtabmap (29): Rate=1.00s, Limit=0.000s, Conversion=0.0229s, RTAB-Map=0.0262s, Maps update=0.0012s pub=0.0015s (local map=1, WM=1)
[ WARN] [1721735631.057318728]: Grid map is empty! (local maps=1)
[ INFO] [1721735631.057941581]: rtabmap (30): Rate=1.00s, Limit=0.000s, Conversion=0.0165s, RTAB-Map=0.0304s, Maps update=0.0011s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735632.145360945]: Grid map is empty! (local maps=1)
[ INFO] [1721735632.149450605]: rtabmap (31): Rate=1.00s, Limit=0.000s, Conversion=0.0142s, RTAB-Map=0.0251s, Maps update=0.0008s pub=0.0039s (local map=1, WM=1)
[ WARN] [1721735633.247327848]: Grid map is empty! (local maps=1)
[ INFO] [1721735633.248003773]: rtabmap (32): Rate=1.00s, Limit=0.000s, Conversion=0.0147s, RTAB-Map=0.0250s, Maps update=0.0019s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735634.243701418]: Grid map is empty! (local maps=1)
[ INFO] [1721735634.244881656]: rtabmap (33): Rate=1.00s, Limit=0.000s, Conversion=0.0076s, RTAB-Map=0.0246s, Maps update=0.0019s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735635.353711814]: Grid map is empty! (local maps=1)
[ INFO] [1721735635.353909049]: rtabmap (34): Rate=1.00s, Limit=0.000s, Conversion=0.0213s, RTAB-Map=0.0321s, Maps update=0.0008s pub=0.0002s (local map=1, WM=1)
[ WARN] [1721735636.447681163]: Grid map is empty! (local maps=1)
[ INFO] [1721735636.448976607]: rtabmap (35): Rate=1.00s, Limit=0.000s, Conversion=0.0079s, RTAB-Map=0.0252s, Maps update=0.0024s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735637.548408196]: Grid map is empty! (local maps=1)
[ INFO] [1721735637.563895926]: rtabmap (36): Rate=1.00s, Limit=0.000s, Conversion=0.0186s, RTAB-Map=0.0251s, Maps update=0.0030s pub=0.0156s (local map=1, WM=1)
[ WARN] [1721735638.545292058]: Grid map is empty! (local maps=1)
[ INFO] [1721735638.546361569]: rtabmap (37): Rate=1.00s, Limit=0.000s, Conversion=0.0181s, RTAB-Map=0.0250s, Maps update=0.0010s pub=0.0010s (local map=1, WM=1)
Does anyone know where the problem might be coming from? My frames and graph seem to be good, but maybe I missed something.
Thanks for your help!
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-with-ModalAI-Starling-2-tp10269.html
Hello!
I am trying to implement RTAB-Map on my Starling 2 drone using the rtabmap_drone_example, but I am facing some difficulties.
Initially, I attempted to use all the sensors to create a good map, but it didn't work. So, I tried using only the ToF (Time of Flight) sensor and its PointCloud.
I had to run RTAB-Map in a Docker container due to the numerous libraries that I can't use directly on the drone.
First, I created a node that publishes the data for RTAB-Map with the correct information, taking data from the mpa_to_ros node published by the drone. This runs on my drone.
mpa_to_ros_interface.py :
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Imu, Image, CameraInfo, PointCloud2
from nav_msgs.msg import Odometry
class MpaToRosInterface(object):
def __init__(self):
rospy.init_node('mpa_to_ros_interface')
self.tof_pc_pub = rospy.Publisher('/drone/tof_pc/pc', PointCloud2, queue_size=1000)
self.odometry_pub = rospy.Publisher('/drone/odometry', Odometry, queue_size=1000)
rospy.Subscriber("/tof_pc", PointCloud2, self.tof_pc_callback)
rospy.Subscriber("/qvio/odometry", Odometry, self.odometry_callback)
def tof_pc_callback(self, data):
data.header.frame_id = "tof_link"
data.header.stamp = rospy.Time.now()
self.tof_pc_pub.publish(data)
def odometry_callback(self, data):
data.header.frame_id = "odom"
data.header.stamp = rospy.Time.now()
self.odometry_pub.publish(data)
def main():
mpa_to_ros_interface = MpaToRosInterface()
rospy.spin()
if __name__ == '__main__':
main()
mpa_to_ros_tf_boradcast.py :
#!/usr/bin/env python
import rospy
import tf
from nav_msgs.msg import Odometry
def handle_odom(msg):
br = tf.TransformBroadcaster()
current_time = rospy.Time.now()
# Extract the position and orientation from the odometry message
position = msg.pose.pose.position
orientation = msg.pose.pose.orientation
# Broadcast the transform from odom to base_link
br.sendTransform((position.x, position.y, position.z),
(orientation.x, orientation.y, orientation.z, orientation.w),
current_time,
"odom",
"map")
def broadcast_static_transforms():
br = tf.TransformBroadcaster()
current_time = rospy.Time.now()
br.sendTransform((0.0, 0.0, 0.0),
tf.transformations.quaternion_from_euler(0, 0, 0),
current_time,
"base_link",
"odom")
# Transform from base_link to imu_link
br.sendTransform((0.0295, -0.0065, -0.016),
tf.transformations.quaternion_from_euler(0, 0, 0),
current_time,
"imu_link",
"base_link")
# Transform from base_link to tof_link
br.sendTransform((0.066, 0.009, -0.012),
tf.transformations.quaternion_from_euler(0, 1.5708, 3.1416),
current_time,
"tof_link",
"base_link")
# Transform from base_link to hires_link
br.sendTransform((0.066, 0.009, -0.012),
tf.transformations.quaternion_from_euler(0, 1.5708, 3.1416),
current_time,
"hires_link",
"base_link")
# Transform from imu_link to tracking_front_link
br.sendTransform((0.037, 0.000, 0.0006),
tf.transformations.quaternion_from_euler(0, 1.5708, 1.5708),
current_time,
"tracking_front_link",
"imu_link")
# Transform from imu_link to tracking_down_link
br.sendTransform((-0.08825, -0.0045, 0.00269),
tf.transformations.quaternion_from_euler(0, 0, 3.1416),
current_time,
"tracking_down_link",
"imu_link")
def main():
rospy.init_node('mpa_to_ros_tf_broadcast')
rospy.Subscriber('/drone/odometry', Odometry, handle_odom)
rate = rospy.Rate(20.0)
while not rospy.is_shutdown():
broadcast_static_transforms()
rate.sleep()
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
pass
mavros.launch :
<?xml version="1.0"?>
<launch>
<node name="voxl_mpa_to_ros_node" type="voxl_mpa_to_ros_node" pkg="voxl_mpa_to_ros" output="screen" />
<node name="mpa_to_ros_interface" type="mpa_to_ros_interface.py" pkg="mpa_to_ros_interface" output="screen" />
<node name="mpa_to_ros_tf_broadcast" type="mpa_to_ros_tf_broadcast.py" pkg="mpa_to_ros_interface" output="screen" />
<arg name="fcu_url" default="udp://127.0.0.1:14551@:14551" />
<arg name="gcs_url" default="" />
<arg name="tgt_system" default="$(env PX4_SYS_ID)" />
<arg name="tgt_component" default="1" />
<arg name="log_output" default="screen" />
<arg name="fcu_protocol" default="v2.0" />
<arg name="respawn_mavros" default="false" />
<include file="$(find mavros)/launch/node.launch">
<arg name="pluginlists_yaml" value="$(find mavros)/launch/px4_pluginlists.yaml" />
<arg name="config_yaml" value="$(find mavros)/launch/px4_config.yaml" />
<arg name="fcu_url" value="$(arg fcu_url)" />
<arg name="gcs_url" value="$(arg gcs_url)" />
<arg name="tgt_system" value="$(arg tgt_system)" />
<arg name="tgt_component" value="$(arg tgt_component)" />
<arg name="log_output" value="$(arg log_output)" />
<arg name="fcu_protocol" value="$(arg fcu_protocol)" />
<arg name="respawn_mavros" default="$(arg respawn_mavros)" />
</include>
</launch>
And this is the launchfile to run rtabmap on docker :
<?xml version="1.0"?>
<launch>
<arg name="localization" default="false"/>
<arg name="rtabmap_viz" default="true"/>
<arg name="ground_truth" default="false"/>
<arg if="$(arg localization)" name="pre_args" default=""/>
<arg unless="$(arg localization)" name="pre_args" default="-d"/>
<remap from="/rtabmap/move_base" to="/move_base"/>
<include file="$(find rtabmap_launch)/launch/rtabmap.launch">
<arg name="subscribe_rgbd" default="false"/>
<arg name="depth" default="false"/>
<arg name="subscribe_scan_cloud" default="true"/>
<arg name="visual_odometry" default="false"/>
<arg name="localization" value="$(arg localization)"/>
<arg name="args" value="$(arg pre_args) --delete_db_on_start --Optimizer/GravitySigma 0.1 --Vis/FeatureType 10 --Kp/DetectorStrategy 10 --Grid/FromDepth false --Grid/MapFrameProjection true --NormalsSegmentation false --Grid/MaxGroundHeight 0.2 --Grid/MaxObstacleHeight 2 --Grid/3D true --Grid/Sensor 0 --Grid/RangeMax 0"/>
<arg name="rtabmap_viz" value="$(arg rtabmap_viz)"/>
<arg name="frame_id" value="base_link"/>
<arg name="odom_frame_id" value="odom"/>
<arg name="publish_tf_odom" default="false"/>
<arg name="odom_topic" value="/drone/odometry"/>
<arg name="scan_cloud_topic" value="/drone/tof_pc/pc"/>
<arg name="imu_topic" value="/drone/imu/data"/>
<arg name="wait_imu_to_init" value="true"/>
<arg name="approx_sync" value="true"/>
<arg name="approx_sync_max_interval" value="0.03"/>
<arg if="$(arg ground_truth)" name="ground_truth_frame_id" value="world"/>
<arg if="$(arg ground_truth)" name="ground_truth_base_frame_id" value="base_link_gt"/>
<arg name="sync_queue_size" default="100"/>
</include>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="odom" to="/drone/odometry"/>
<remap from="camera_cloud" to="/drone/tof_pc/pc"/>
<rosparam file="$(find rtabmap_drone)/param/costmap_common_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_drone)/param/costmap_common_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find rtabmap_drone)/param/global_costmap_params.yaml" command="load"/>
<rosparam file="$(find rtabmap_drone)/param/local_costmap_params.yaml" command="load"/>
<rosparam file="$(find rtabmap_drone)/param/base_local_planner_params.yaml" command="load"/>
</node>
<node name="empty_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_empty">
</node>
<node name="marked_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_marked" />
</launch>
My nodes on the drone seem to work well, but when I launch RTAB-Map, I get these messages:
voxl2:~$ ./rtabmap_launch.sh
... logging to /root/.ros/log/23764bba-48ea-11ef-a0bf-00c0cab3a54a/roslaunch-m0054-1.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://m0054:43045/
SUMMARY
========
CLEAR PARAMETERS
* /rtabmap/rtabmap/
* /rtabmap/rtabmap_viz/
PARAMETERS
* /empty_voxels_markers/cell_type: 0
* /move_base/DWAPlannerROS/acc_lim_theta: 3
* /move_base/DWAPlannerROS/acc_lim_trans: 1.5
* /move_base/DWAPlannerROS/acc_lim_x: 1.5
* /move_base/DWAPlannerROS/acc_lim_y: 1.5
* /move_base/DWAPlannerROS/forward_point_distance: 0.1
* /move_base/DWAPlannerROS/global_frame_id: odom
* /move_base/DWAPlannerROS/goal_distance_bias: 10
* /move_base/DWAPlannerROS/latch_xy_goal_tolerance: False
* /move_base/DWAPlannerROS/max_scaling_factor: 0.2
* /move_base/DWAPlannerROS/max_vel_theta: 1
* /move_base/DWAPlannerROS/max_vel_trans: 0.2
* /move_base/DWAPlannerROS/max_vel_x: 0.2
* /move_base/DWAPlannerROS/max_vel_y: 0.1
* /move_base/DWAPlannerROS/min_vel_theta: 0
* /move_base/DWAPlannerROS/min_vel_trans: 0.01
* /move_base/DWAPlannerROS/min_vel_x: -0.01
* /move_base/DWAPlannerROS/min_vel_y: -0.1
* /move_base/DWAPlannerROS/occdist_scale: 0.08
* /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05
* /move_base/DWAPlannerROS/path_distance_bias: 64
* /move_base/DWAPlannerROS/publish_cost_grid_pc: True
* /move_base/DWAPlannerROS/publish_traj_pc: True
* /move_base/DWAPlannerROS/scaling_speed: 0.25
* /move_base/DWAPlannerROS/sim_time: 4
* /move_base/DWAPlannerROS/stop_time_buffer: 0.2
* /move_base/DWAPlannerROS/theta_stopped_vel: 0.01
* /move_base/DWAPlannerROS/trans_stopped_vel: 0.01
* /move_base/DWAPlannerROS/vth_samples: 20
* /move_base/DWAPlannerROS/vx_samples: 6
* /move_base/DWAPlannerROS/vy_samples: 6
* /move_base/DWAPlannerROS/xy_goal_tolerance: 0.3
* /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.5
* /move_base/NavfnROS/allow_unknown: True
* /move_base/base_local_planner: dwa_local_planner...
* /move_base/controller_frequency: 10.0
* /move_base/global_costmap/controller_patience: 2.0
* /move_base/global_costmap/cost_scaling_factor: 1.5
* /move_base/global_costmap/footprint: [[0.16, 0.16], [-...
* /move_base/global_costmap/footprint_padding: 0.05
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/inflation_layer/inflate_unkown: True
* /move_base/global_costmap/inflation_radius: 1.5
* /move_base/global_costmap/obstacle_range: 3.0
* /move_base/global_costmap/plugins: [{'name': 'static...
* /move_base/global_costmap/publish_frequency: 1
* /move_base/global_costmap/raytrace_range: 3.5
* /move_base/global_costmap/robot_base_frame: base_link
* /move_base/global_costmap/robot_radius: 0.32
* /move_base/global_costmap/static_map: True
* /move_base/global_costmap/transform_tolerance: 1
* /move_base/global_costmap/update_frequency: 1
* /move_base/local_costmap/controller_patience: 2.0
* /move_base/local_costmap/cost_scaling_factor: 1.5
* /move_base/local_costmap/footprint: [[0.16, 0.16], [-...
* /move_base/local_costmap/footprint_padding: 0.05
* /move_base/local_costmap/global_frame: map
* /move_base/local_costmap/height: 4
* /move_base/local_costmap/inflation_radius: 1.5
* /move_base/local_costmap/obstacle_range: 3.0
* /move_base/local_costmap/plugins: [{'name': 'voxel_...
* /move_base/local_costmap/publish_frequency: 2.0
* /move_base/local_costmap/raytrace_range: 3.5
* /move_base/local_costmap/resolution: 0.05
* /move_base/local_costmap/robot_base_frame: base_link
* /move_base/local_costmap/robot_radius: 0.32
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 5.0
* /move_base/local_costmap/voxel_layer/3d_cloud/clearing: True
* /move_base/local_costmap/voxel_layer/3d_cloud/data_type: PointCloud2
* /move_base/local_costmap/voxel_layer/3d_cloud/marking: True
* /move_base/local_costmap/voxel_layer/3d_cloud/max_obstacle_height: 1000
* /move_base/local_costmap/voxel_layer/3d_cloud/min_obstacle_height: -1000
* /move_base/local_costmap/voxel_layer/3d_cloud/topic: /camera_cloud
* /move_base/local_costmap/voxel_layer/enabled: True
* /move_base/local_costmap/voxel_layer/footprint_clearing_enabled: False
* /move_base/local_costmap/voxel_layer/observation_sources: 3d_cloud
* /move_base/local_costmap/voxel_layer/publish_voxel_map: True
* /move_base/local_costmap/voxel_layer/z_resolution: 0.05
* /move_base/local_costmap/voxel_layer/z_voxels: 9
* /move_base/local_costmap/width: 4
* /move_base/planner_frequency: 1
* /rosdistro: noetic
* /rosversion: 1.16.0
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: base_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/latch: False
* /rtabmap/rtabmap/loc_thr: 0.0
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id: odom
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: False
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: True
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/sync_queue_size: 100
* /rtabmap/rtabmap/topic_queue_size: 1
* /rtabmap/rtabmap/use_action_for_goal: True
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap_viz/approx_sync: True
* /rtabmap/rtabmap_viz/frame_id: base_link
* /rtabmap/rtabmap_viz/odom_frame_id: odom
* /rtabmap/rtabmap_viz/subscribe_depth: False
* /rtabmap/rtabmap_viz/subscribe_rgb: False
* /rtabmap/rtabmap_viz/subscribe_rgbd: False
* /rtabmap/rtabmap_viz/subscribe_scan: False
* /rtabmap/rtabmap_viz/subscribe_scan_cloud: True
* /rtabmap/rtabmap_viz/subscribe_scan_descriptor: False
* /rtabmap/rtabmap_viz/subscribe_stereo: False
* /rtabmap/rtabmap_viz/sync_queue_size: 100
* /rtabmap/rtabmap_viz/topic_queue_size: 1
* /rtabmap/rtabmap_viz/wait_for_transform_duration: 0.2
NODES
/
empty_voxels_markers (rtabmap_costmap_plugins/voxel_markers)
marked_voxels_markers (rtabmap_costmap_plugins/voxel_markers)
move_base (move_base/move_base)
/rtabmap/
rtabmap (rtabmap_slam/rtabmap)
rtabmap_viz (rtabmap_viz/rtabmap_viz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rtabmap-1]: started with pid [50]
process[rtabmap/rtabmap_viz-2]: started with pid [51]
process[move_base-3]: started with pid [52]
process[empty_voxels_markers-4]: started with pid [53]
process[marked_voxels_markers-5]: started with pid [54]
[ WARN] [1721735598.473160994]: global_costmap: Pre-Hydro parameter "static_map" unused since "plugins" is provided
[ INFO] [1721735598.475875560]: global_costmap: Using plugin "static_layer"
[ INFO] [1721735598.490125923]: Requesting the map...
[ INFO] [1721735598.891798017]: Starting node...
[ INFO] [1721735598.931406220]: Initializing nodelet with 8 worker threads.
[ INFO] [1721735598.972168456]: Starting node...
[ INFO] [1721735599.143035720]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1721735599.143094104]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1721735599.143114052]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1721735599.143124937]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1721735599.143141238]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1721735599.143164207]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1721735599.143192852]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1721735599.143204622]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1721735599.143438054]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1721735599.165719675]: rtabmap: frame_id = base_link
[ INFO] [1721735599.165766288]: rtabmap: odom_frame_id = odom
[ INFO] [1721735599.166146956]: rtabmap: map_frame_id = map
[ INFO] [1721735599.166185497]: rtabmap: log_to_rosout_level = 4
[ INFO] [1721735599.166213933]: rtabmap: initial_pose =
[ INFO] [1721735599.166227527]: rtabmap: use_action_for_goal = true
[ INFO] [1721735599.166248932]: rtabmap: tf_delay = 0.050000
[ INFO] [1721735599.166263515]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1721735599.166278984]: rtabmap: odom_sensor_sync = false
[ INFO] [1721735599.166294452]: rtabmap: pub_loc_pose_only_when_localizing = false
[ INFO] [1721735599.167077922]: rtabmap: gen_scan = false
[ INFO] [1721735599.167112244]: rtabmap: gen_depth = false
[ INFO] [1721735599.167549681]: rtabmap: scan_cloud_max_points = 0
[ INFO] [1721735599.167576763]: rtabmap: scan_cloud_is_2d = false
[ INFO] [1721735599.355361574]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1721735599.355736825]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ WARN] (2024-07-23 11:53:19.570) Parameters.cpp:1161::parseArguments() Parameter migration from "Grid/FromDepth" to "Grid/Sensor" (value=false).
[ INFO] [1721735599.570785526]: Update RTAB-Map parameter "Grid/3D"="true" from arguments
[ INFO] [1721735599.570828338]: Update RTAB-Map parameter "Grid/MapFrameProjection"="true" from arguments
[ INFO] [1721735599.570854639]: Update RTAB-Map parameter "Grid/MaxGroundHeight"="0.2" from arguments
[ INFO] [1721735599.570881878]: Update RTAB-Map parameter "Grid/MaxObstacleHeight"="2" from arguments
[ INFO] [1721735599.570895055]: Update RTAB-Map parameter "Grid/RangeMax"="0" from arguments
[ INFO] [1721735599.570905315]: Update RTAB-Map parameter "Grid/Sensor"="0" from arguments
[ INFO] [1721735599.570913440]: Update RTAB-Map parameter "Kp/DetectorStrategy"="10" from arguments
[ INFO] [1721735599.570922554]: Update RTAB-Map parameter "Optimizer/GravitySigma"="0.1" from arguments
[ INFO] [1721735599.570935783]: Update RTAB-Map parameter "Vis/FeatureType"="10" from arguments
[ INFO] [1721735599.721372272]: Setting "Icp/PointToPlaneRadius" parameter to 0 (default 0.000000) as "subscribe_scan_cloud" is true.
[ INFO] [1721735599.722403236]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1721735599.722782393]: rtabmap: Using database from "/root/.ros/rtabmap.db" (0 MB).
[ INFO] [1721735600.217641220]: rtabmap: Database version = "0.21.5".
[ INFO] [1721735600.218029075]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[ INFO] [1721735600.238467518]: /rtabmap/rtabmap: subscribe_depth = false
[ INFO] [1721735600.238526788]: /rtabmap/rtabmap: subscribe_rgb = false
[ INFO] [1721735600.238547673]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1721735600.238561162]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1721735600.238576630]: /rtabmap/rtabmap: subscribe_sensor_data = false
[ INFO] [1721735600.238606890]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1721735600.238620431]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1721735600.238633608]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1721735600.238651680]: /rtabmap/rtabmap: subscribe_scan_cloud = true
[ INFO] [1721735600.238667670]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1721735600.238677669]: /rtabmap/rtabmap: topic_queue_size = 1
[ INFO] [1721735600.238693867]: /rtabmap/rtabmap: sync_queue_size = 100
[ INFO] [1721735600.238872821]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1721735600.241093077]: Setup scan callback
[ INFO] [1721735600.250247690]:
/rtabmap/rtabmap subscribed to:
/drone/tof_pc/pc
[ WARN] [1721735600.253312978]: There is no image subscription, bag-of-words loop closure detection will be disabled...
[ WARN] [1721735600.253397194]: Setting Kp/MaxFeatures=-1 (bag-of-words disabled)
[ WARN] [1721735600.253422298]: Setting Reg/Strategy=1 (ICP)
[ WARN] [1721735600.253440318]: Setting "RGBD/ProximityPathMaxNeighbors" parameter to 1 (default 0) as "subscribe_scan_cloud" is true and "Reg/Strategy" uses ICP. To disable, set "RGBD/ProximityPathMaxNeighbors" to 0. To suppress this warning, add
[ INFO] [1721735600.296892818]: rtabmap_viz: Using configuration from "/root/.ros/rtabmap_gui.ini"
[ INFO] [1721735600.422576840]: rtabmap 0.21.5 started...
[ WARN] [1721735600.515297370]: Grid map is empty! (local maps=1)
[ INFO] [1721735600.516336979]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0306s, RTAB-Map=0.0904s, Maps update=0.0018s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735601.472010518]: Grid map is empty! (local maps=1)
[ INFO] [1721735601.472310094]: rtabmap (2): Rate=1.00s, Limit=0.000s, Conversion=0.0290s, RTAB-Map=0.0461s, Maps update=0.0003s pub=0.0004s (local map=1, WM=1)
[ WARN] [1721735602.548561794]: Grid map is empty! (local maps=1)
[ INFO] [1721735602.549918948]: rtabmap (3): Rate=1.00s, Limit=0.000s, Conversion=0.0341s, RTAB-Map=0.0235s, Maps update=0.0032s pub=0.0014s (local map=1, WM=1)
[ WARN] [1721735603.562147317]: Grid map is empty! (local maps=1)
[ INFO] [1721735603.562502933]: rtabmap (4): Rate=1.00s, Limit=0.000s, Conversion=0.0285s, RTAB-Map=0.0382s, Maps update=0.0012s pub=0.0004s (local map=1, WM=1)
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ WARN] [1721735604.647968496]: Grid map is empty! (local maps=1)
[ INFO] [1721735604.648631345]: rtabmap (5): Rate=1.00s, Limit=0.000s, Conversion=0.0230s, RTAB-Map=0.0279s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735605.750366819]: Grid map is empty! (local maps=1)
[ INFO] [1721735605.750833110]: rtabmap (6): Rate=1.00s, Limit=0.000s, Conversion=0.0313s, RTAB-Map=0.0297s, Maps update=0.0003s pub=0.0006s (local map=1, WM=1)
[ INFO] [1721735606.309773620]: rtabmap_viz: Reading parameters from the ROS server...
[ INFO] [1721735606.669859919]: rtabmap_viz: Parameters read = 377
[ INFO] [1721735606.669924761]: rtabmap_viz: Parameters successfully read.
[ WARN] [1721735606.848397740]: Grid map is empty! (local maps=1)
[ INFO] [1721735606.848831011]: rtabmap (7): Rate=1.00s, Limit=0.000s, Conversion=0.0299s, RTAB-Map=0.0260s, Maps update=0.0021s pub=0.0005s (local map=1, WM=1)
[ INFO] [1721735607.632474048]: /rtabmap/rtabmap_viz: subscribe_depth = false
[ INFO] [1721735607.632528786]: /rtabmap/rtabmap_viz: subscribe_rgb = false
[ INFO] [1721735607.632548733]: /rtabmap/rtabmap_viz: subscribe_stereo = false
[ INFO] [1721735607.632567743]: /rtabmap/rtabmap_viz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1721735607.632585139]: /rtabmap/rtabmap_viz: subscribe_sensor_data = false
[ INFO] [1721735607.632601805]: /rtabmap/rtabmap_viz: subscribe_odom_info = false
[ INFO] [1721735607.632619982]: /rtabmap/rtabmap_viz: subscribe_user_data = false
[ INFO] [1721735607.632637950]: /rtabmap/rtabmap_viz: subscribe_scan = false
[ INFO] [1721735607.632653887]: /rtabmap/rtabmap_viz: subscribe_scan_cloud = true
[ INFO] [1721735607.632685397]: /rtabmap/rtabmap_viz: subscribe_scan_descriptor = false
[ INFO] [1721735607.632873153]: /rtabmap/rtabmap_viz: topic_queue_size = 1
[ INFO] [1721735607.633012056]: /rtabmap/rtabmap_viz: sync_queue_size = 100
[ INFO] [1721735607.633132730]: /rtabmap/rtabmap_viz: approx_sync = true
[ INFO] [1721735607.633300955]: Setup scan callback
[ INFO] [1721735607.635796417]:
/rtabmap/rtabmap_viz subscribed to:
/drone/tof_pc/pc
[ INFO] [1721735607.637549605]: rtabmap_viz started.
[ WARN] [1721735607.842693916]: Grid map is empty! (local maps=1)
[ INFO] [1721735607.843286871]: rtabmap (8): Rate=1.00s, Limit=0.000s, Conversion=0.0225s, RTAB-Map=0.0241s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735608.844783757]: Grid map is empty! (local maps=1)
[ INFO] [1721735608.850908874]: rtabmap (9): Rate=1.00s, Limit=0.000s, Conversion=0.0185s, RTAB-Map=0.0252s, Maps update=0.0007s pub=0.0061s (local map=1, WM=1)
[ WARN] [1721735609.898011464]: Grid map is empty! (local maps=1)
[ INFO] [1721735609.899019253]: rtabmap (10): Rate=1.00s, Limit=0.000s, Conversion=0.0215s, RTAB-Map=0.0725s, Maps update=0.0011s pub=0.0010s (local map=1, WM=1)
[ WARN] [1721735610.950040302]: Grid map is empty! (local maps=1)
[ INFO] [1721735610.952081609]: rtabmap (11): Rate=1.00s, Limit=0.000s, Conversion=0.0518s, RTAB-Map=0.0300s, Maps update=0.0004s pub=0.0017s (local map=1, WM=1)
[ INFO] [1721735610.952485350]: rtabmap: paused!
[ INFO] [1721735610.960550060]: rtabmap: resumed!
[ WARN] (2024-07-23 11:53:31.961) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 1 (Rtabmap/MaxRepublished=2)
[ WARN] [1721735611.966008096]: Grid map is empty! (local maps=1)
[ INFO] [1721735611.967449834]: rtabmap (12): Rate=1.00s, Limit=0.000s, Conversion=0.0367s, RTAB-Map=0.0405s, Maps update=0.0002s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735612.949552396]: Grid map is empty! (local maps=1)
[ INFO] [1721735612.951225952]: rtabmap (13): Rate=1.00s, Limit=0.000s, Conversion=0.0286s, RTAB-Map=0.0289s, Maps update=0.0010s pub=0.0016s (local map=1, WM=1)
[ WARN] [1721735613.950026080]: Grid map is empty! (local maps=1)
[ INFO] [1721735613.950752314]: rtabmap (14): Rate=1.00s, Limit=0.000s, Conversion=0.0291s, RTAB-Map=0.0285s, Maps update=0.0003s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735615.096640665]: Grid map is empty! (local maps=1)
[ INFO] [1721735615.097455595]: rtabmap (15): Rate=1.00s, Limit=0.000s, Conversion=0.0165s, RTAB-Map=0.0729s, Maps update=0.0012s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735616.147982481]: Grid map is empty! (local maps=1)
[ INFO] [1721735616.149015115]: rtabmap (16): Rate=1.00s, Limit=0.000s, Conversion=0.0268s, RTAB-Map=0.0270s, Maps update=0.0018s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735617.266636259]: Grid map is empty! (local maps=1)
[ INFO] [1721735617.267710715]: rtabmap (17): Rate=1.00s, Limit=0.000s, Conversion=0.0275s, RTAB-Map=0.0418s, Maps update=0.0003s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735618.350049035]: Grid map is empty! (local maps=1)
[ INFO] [1721735618.350799280]: rtabmap (18): Rate=1.00s, Limit=0.000s, Conversion=0.0273s, RTAB-Map=0.0287s, Maps update=0.0013s pub=0.0008s (local map=1, WM=1)
[ WARN] [1721735619.451121010]: Grid map is empty! (local maps=1)
[ INFO] [1721735619.452286662]: rtabmap (19): Rate=1.00s, Limit=0.000s, Conversion=0.0429s, RTAB-Map=0.0294s, Maps update=0.0009s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735620.458261696]: Grid map is empty! (local maps=1)
[ INFO] [1721735620.459339225]: rtabmap (20): Rate=1.00s, Limit=0.000s, Conversion=0.0156s, RTAB-Map=0.0363s, Maps update=0.0010s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735621.551124077]: Grid map is empty! (local maps=1)
[ INFO] [1721735621.552487642]: rtabmap (21): Rate=1.00s, Limit=0.000s, Conversion=0.0438s, RTAB-Map=0.0307s, Maps update=0.0009s pub=0.0014s (local map=1, WM=1)
[ WARN] [1721735622.544289416]: Grid map is empty! (local maps=1)
[ INFO] [1721735622.545402622]: rtabmap (22): Rate=1.00s, Limit=0.000s, Conversion=0.0229s, RTAB-Map=0.0232s, Maps update=0.0009s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735623.549656693]: Grid map is empty! (local maps=1)
[ INFO] [1721735623.551814409]: rtabmap (23): Rate=1.00s, Limit=0.000s, Conversion=0.0121s, RTAB-Map=0.0262s, Maps update=0.0022s pub=0.0021s (local map=1, WM=1)
[ WARN] [1721735624.645383310]: Grid map is empty! (local maps=1)
[ INFO] [1721735624.646384644]: rtabmap (24): Rate=1.00s, Limit=0.000s, Conversion=0.0211s, RTAB-Map=0.0254s, Maps update=0.0002s pub=0.0010s (local map=1, WM=1)
[ WARN] [1721735625.749224114]: Grid map is empty! (local maps=1)
[ INFO] [1721735625.750026598]: rtabmap (25): Rate=1.00s, Limit=0.000s, Conversion=0.0098s, RTAB-Map=0.0265s, Maps update=0.0009s pub=0.0009s (local map=1, WM=1)
[ WARN] [1721735626.858550931]: Grid map is empty! (local maps=1)
[ INFO] [1721735626.859247115]: rtabmap (26): Rate=1.00s, Limit=0.000s, Conversion=0.0460s, RTAB-Map=0.0307s, Maps update=0.0010s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735627.996090071]: Grid map is empty! (local maps=1)
[ INFO] [1721735627.997219424]: rtabmap (27): Rate=1.00s, Limit=0.000s, Conversion=0.0378s, RTAB-Map=0.0721s, Maps update=0.0002s pub=0.0018s (local map=1, WM=1)
[ WARN] [1721735628.947040165]: Grid map is empty! (local maps=1)
[ INFO] [1721735628.948890076]: rtabmap (28): Rate=1.00s, Limit=0.000s, Conversion=0.0149s, RTAB-Map=0.0246s, Maps update=0.0011s pub=0.0019s (local map=1, WM=1)
[ WARN] [1721735630.049006981]: Grid map is empty! (local maps=1)
[ INFO] [1721735630.050534816]: rtabmap (29): Rate=1.00s, Limit=0.000s, Conversion=0.0229s, RTAB-Map=0.0262s, Maps update=0.0012s pub=0.0015s (local map=1, WM=1)
[ WARN] [1721735631.057318728]: Grid map is empty! (local maps=1)
[ INFO] [1721735631.057941581]: rtabmap (30): Rate=1.00s, Limit=0.000s, Conversion=0.0165s, RTAB-Map=0.0304s, Maps update=0.0011s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735632.145360945]: Grid map is empty! (local maps=1)
[ INFO] [1721735632.149450605]: rtabmap (31): Rate=1.00s, Limit=0.000s, Conversion=0.0142s, RTAB-Map=0.0251s, Maps update=0.0008s pub=0.0039s (local map=1, WM=1)
[ WARN] [1721735633.247327848]: Grid map is empty! (local maps=1)
[ INFO] [1721735633.248003773]: rtabmap (32): Rate=1.00s, Limit=0.000s, Conversion=0.0147s, RTAB-Map=0.0250s, Maps update=0.0019s pub=0.0007s (local map=1, WM=1)
[ WARN] [1721735634.243701418]: Grid map is empty! (local maps=1)
[ INFO] [1721735634.244881656]: rtabmap (33): Rate=1.00s, Limit=0.000s, Conversion=0.0076s, RTAB-Map=0.0246s, Maps update=0.0019s pub=0.0012s (local map=1, WM=1)
[ WARN] [1721735635.353711814]: Grid map is empty! (local maps=1)
[ INFO] [1721735635.353909049]: rtabmap (34): Rate=1.00s, Limit=0.000s, Conversion=0.0213s, RTAB-Map=0.0321s, Maps update=0.0008s pub=0.0002s (local map=1, WM=1)
[ WARN] [1721735636.447681163]: Grid map is empty! (local maps=1)
[ INFO] [1721735636.448976607]: rtabmap (35): Rate=1.00s, Limit=0.000s, Conversion=0.0079s, RTAB-Map=0.0252s, Maps update=0.0024s pub=0.0011s (local map=1, WM=1)
[ WARN] [1721735637.548408196]: Grid map is empty! (local maps=1)
[ INFO] [1721735637.563895926]: rtabmap (36): Rate=1.00s, Limit=0.000s, Conversion=0.0186s, RTAB-Map=0.0251s, Maps update=0.0030s pub=0.0156s (local map=1, WM=1)
[ WARN] [1721735638.545292058]: Grid map is empty! (local maps=1)
[ INFO] [1721735638.546361569]: rtabmap (37): Rate=1.00s, Limit=0.000s, Conversion=0.0181s, RTAB-Map=0.0250s, Maps update=0.0010s pub=0.0010s (local map=1, WM=1)
Does anyone know where the problem might be coming from? My frames and graph seem to be good, but maybe I missed something.
Thanks for your help!
| Free forum by Nabble | Edit this page |