Re: Lidar based 3d SLAM in sparse feature environment
Posted by Gi_T on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-based-3d-SLAM-in-sparse-feature-environment-tp10174p10274.html
Hey Mathieu,
sorry for the late reply. We shifted our focus from the simulation to tests with real data as we experienced problems on the simulated data with multiple algorithms. Furthermore I also needed a couple of weeks to get more familiar with the unterlying theory of SLAM so I can do more than changing parameters and hoping it works out. Your replies on lots of Github issues and questions in this forum were lots of help for this so huge thanks for that.
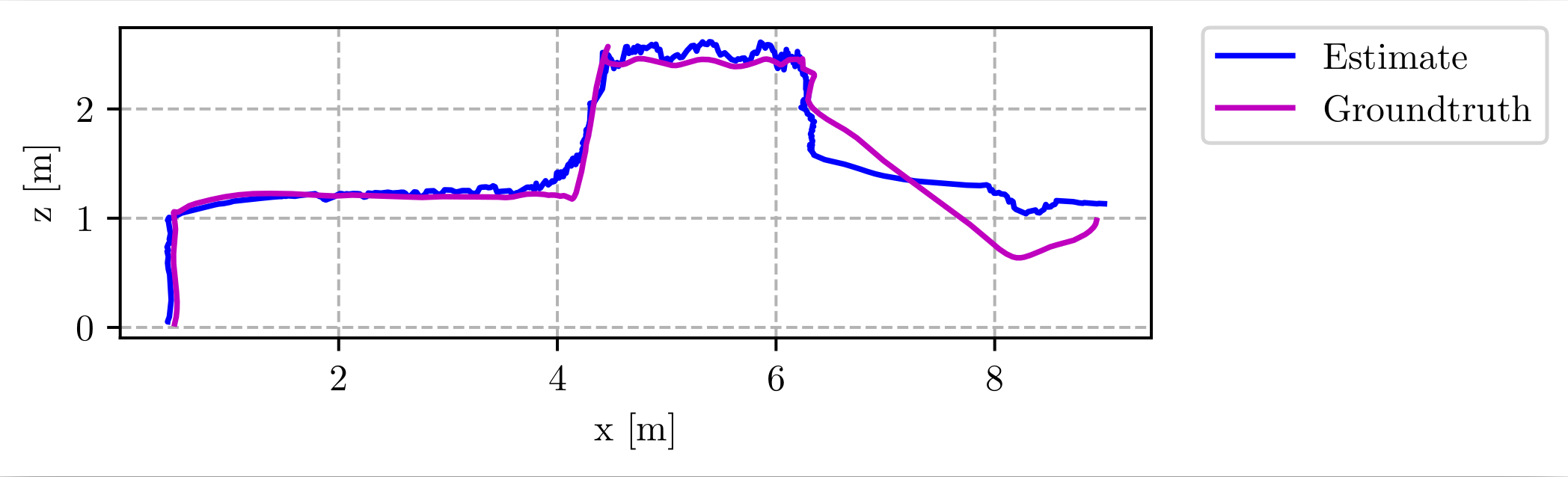
Still as I had a look at the simulation today I will share my findings on this first. I compared the ground truth odometry obtained through libgazebo_ros_p3d.so with the odometry obtained from /rtabmap/odom and it seemed to match pretty well. Also the drone moving upwards can be seen in both topics.
I'm not sure why this happens though when looking at the offboard_node.cpp file.
As my focus mainly shifted on using real hardware and working with real data I would have some new questions.
First I'm not quite sure what happens when a Loop Closure is detected. As far as I understand /rtabmap/odom is not changed on loop closure. Here I mainly have two questions 1) what topic/transform should be used to provide the PX4 with /mavros/vision_pose/pose and 2) if I use RTABMAP with the Octomap integration for exploration how can I take loop closure into account?
Additionally for the real data I noticed that the Depth and RGB projection from my Realsense D455 is not perfectly aligned with the Lidar data (Velodyne VLP-16). Do you have any suggestion for tuning for that?
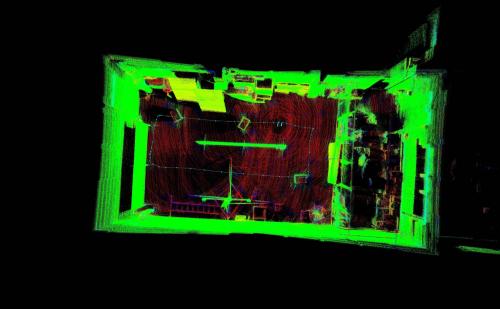
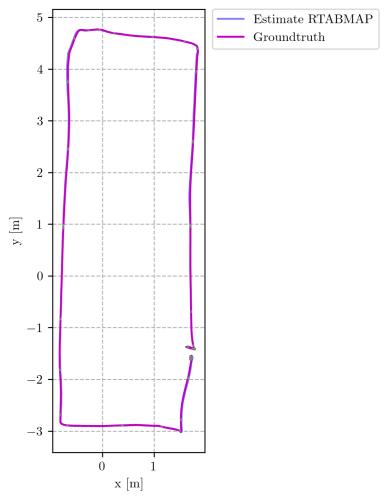
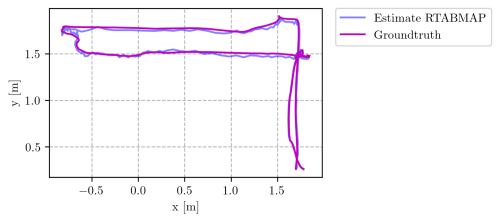
Current real-world results:
Simulation bag (using https://github.com/TannerGilbert/rtabmap_drone_example): https://drive.google.com/file/d/1bHPLPg9y_sIOW-vzoqYTJY3LvFQAo-EE/view?usp=drive_link
I'll also try to provide a Rosbag of a real flight where the camera and lidar alignment inperfections can be observed as soon as I got confirmation that I'm allowed to share.
Thanks again for creating such a great library and for all the help you offer.
Cheers,
Gilbert
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-based-3d-SLAM-in-sparse-feature-environment-tp10174p10274.html
Hey Mathieu,
sorry for the late reply. We shifted our focus from the simulation to tests with real data as we experienced problems on the simulated data with multiple algorithms. Furthermore I also needed a couple of weeks to get more familiar with the unterlying theory of SLAM so I can do more than changing parameters and hoping it works out. Your replies on lots of Github issues and questions in this forum were lots of help for this so huge thanks for that.
Still as I had a look at the simulation today I will share my findings on this first. I compared the ground truth odometry obtained through libgazebo_ros_p3d.so with the odometry obtained from /rtabmap/odom and it seemed to match pretty well. Also the drone moving upwards can be seen in both topics.
I'm not sure why this happens though when looking at the offboard_node.cpp file.
As my focus mainly shifted on using real hardware and working with real data I would have some new questions.
First I'm not quite sure what happens when a Loop Closure is detected. As far as I understand /rtabmap/odom is not changed on loop closure. Here I mainly have two questions 1) what topic/transform should be used to provide the PX4 with /mavros/vision_pose/pose and 2) if I use RTABMAP with the Octomap integration for exploration how can I take loop closure into account?
Additionally for the real data I noticed that the Depth and RGB projection from my Realsense D455 is not perfectly aligned with the Lidar data (Velodyne VLP-16). Do you have any suggestion for tuning for that?
Current real-world results:
Simulation bag (using https://github.com/TannerGilbert/rtabmap_drone_example): https://drive.google.com/file/d/1bHPLPg9y_sIOW-vzoqYTJY3LvFQAo-EE/view?usp=drive_link
I'll also try to provide a Rosbag of a real flight where the camera and lidar alignment inperfections can be observed as soon as I got confirmation that I'm allowed to share.
Thanks again for creating such a great library and for all the help you offer.
Cheers,
Gilbert
| Free forum by Nabble | Edit this page |