Re: cv::Exception Airsim implementation
Posted by Manuelo247 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10309.html
Thank you very much for your response and your help! With RViz, I was able to visualize that there was something strange with the depth image, but since I still haven't managed to run RTAB-Map, I haven't been worrying about that aspect yet. Thanks for the clarifications; once I get to that part, I will try what you mentioned.
Regarding the original error, I have resolved the cv::Exception. It seems that the dependencies were not downloaded correctly, so I simply re-ran sudo apt install ros-$ROS_DISTRO-rtabmap* to install them. Additionally, I added the line find_package(OpenCV 4 REQUIRED) in my CMakeLists.txt to ensure that it uses the version of OpenCV I have installed. Unfortunately, I still haven't managed to run RTAB-Map. When I try to run it along with the rosbag, I see the following:
I am running RTAB-Map as follows:
This is what I see in RTAB-Map, and it closes after a few seconds.
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10309.html
Thank you very much for your response and your help! With RViz, I was able to visualize that there was something strange with the depth image, but since I still haven't managed to run RTAB-Map, I haven't been worrying about that aspect yet. Thanks for the clarifications; once I get to that part, I will try what you mentioned.
Regarding the original error, I have resolved the cv::Exception. It seems that the dependencies were not downloaded correctly, so I simply re-ran sudo apt install ros-$ROS_DISTRO-rtabmap* to install them. Additionally, I added the line find_package(OpenCV 4 REQUIRED) in my CMakeLists.txt to ensure that it uses the version of OpenCV I have installed. Unfortunately, I still haven't managed to run RTAB-Map. When I try to run it along with the rosbag, I see the following:
[ INFO] [1722532010.979733391, 1722528810.284685780]: rtabmap 0.21.5 started... [ WARN] (2024-08-01 11:06:51.160) util3d.cpp:606::cloudFromDepthRGB() Cloud with only NaN values created! [ INFO] [1722532011.168262229, 1722528810.466757323]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0074s, RTAB-Map=0.0324s, Maps update=0.0024s pub=0.0015s (local map=1, WM=1) [ INFO] [1722532012.221922422, 1722528811.519834617]: rtabmap (2): Rate=1.00s, Limit=0.000s, Conversion=0.0004s, RTAB-Map=0.0384s, Maps update=0.0002s pub=0.0000s (local map=2, WM=2) [ INFO] [1722532013.312328784, 1722528812.611937877]: rtabmap (3): Rate=1.00s, Limit=0.000s, Conversion=0.0001s, RTAB-Map=0.0168s, Maps update=0.0000s pub=0.0000s (local map=3, WM=3) [ WARN] (2024-08-01 11:06:54.301) util3d.cpp:606::cloudFromDepthRGB() Cloud with only NaN values created! [ INFO] [1722532014.302363932, 1722528813.602527825]: rtabmap (4): Rate=1.00s, Limit=0.000s, Conversion=0.0001s, RTAB-Map=0.0062s, Maps update=0.0001s pub=0.0001s (local map=4, WM=4)
I am running RTAB-Map as follows:
/home/manuelo247/catkin_ws/devel/lib/rtabmap_slam/rtabmap /rgb/camera_info:=/airsim/image/camera_info /odom_info:=/airsim/odom_info /odom:=/airsim/odom /depth/image:=/airsim/image/depth /rgb/image:=/airsim/image/rgb __name:=rtabmap --delete_db_on_start
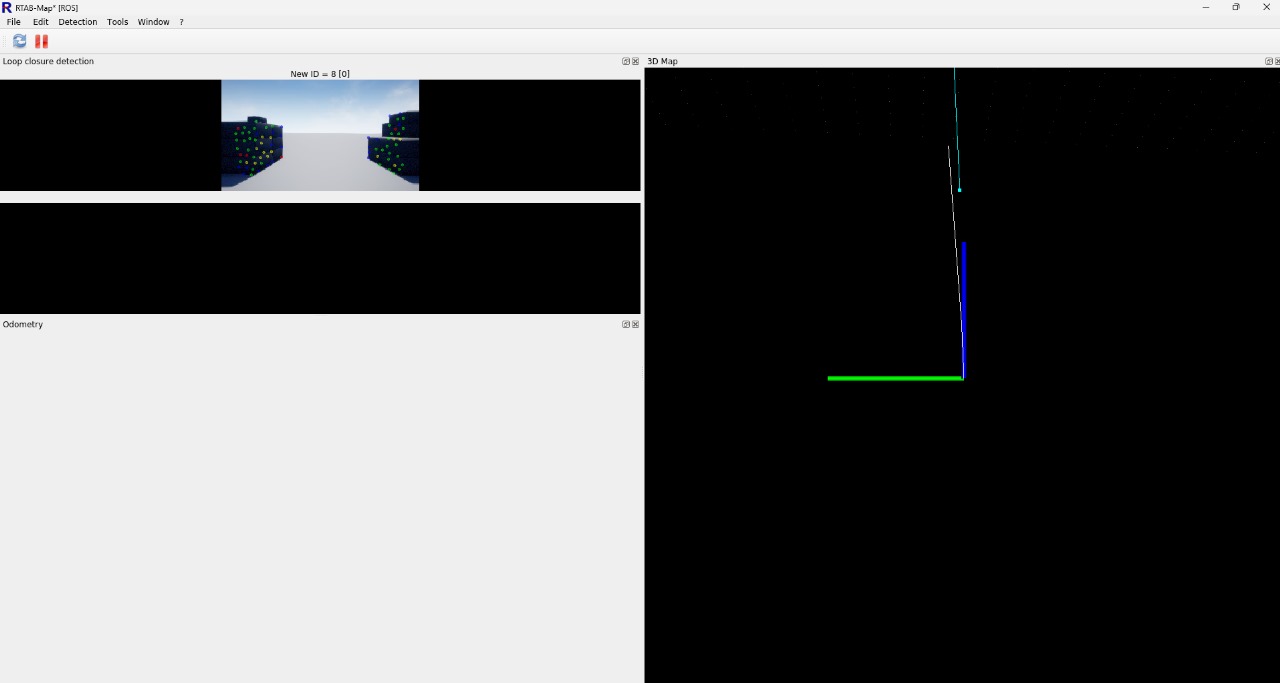
This is what I see in RTAB-Map, and it closes after a few seconds.
| Free forum by Nabble | Edit this page |