Re: cv::Exception Airsim implementation
Posted by Manuelo247 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10365.html
Here is the rosbag again. I made some changes, such as adding the following line to my launcher:
As you suggested, I was able to fully visualize the data with RViz. However, I must be publishing something incorrectly or using RTAB-Map the wrong way because it looks like this: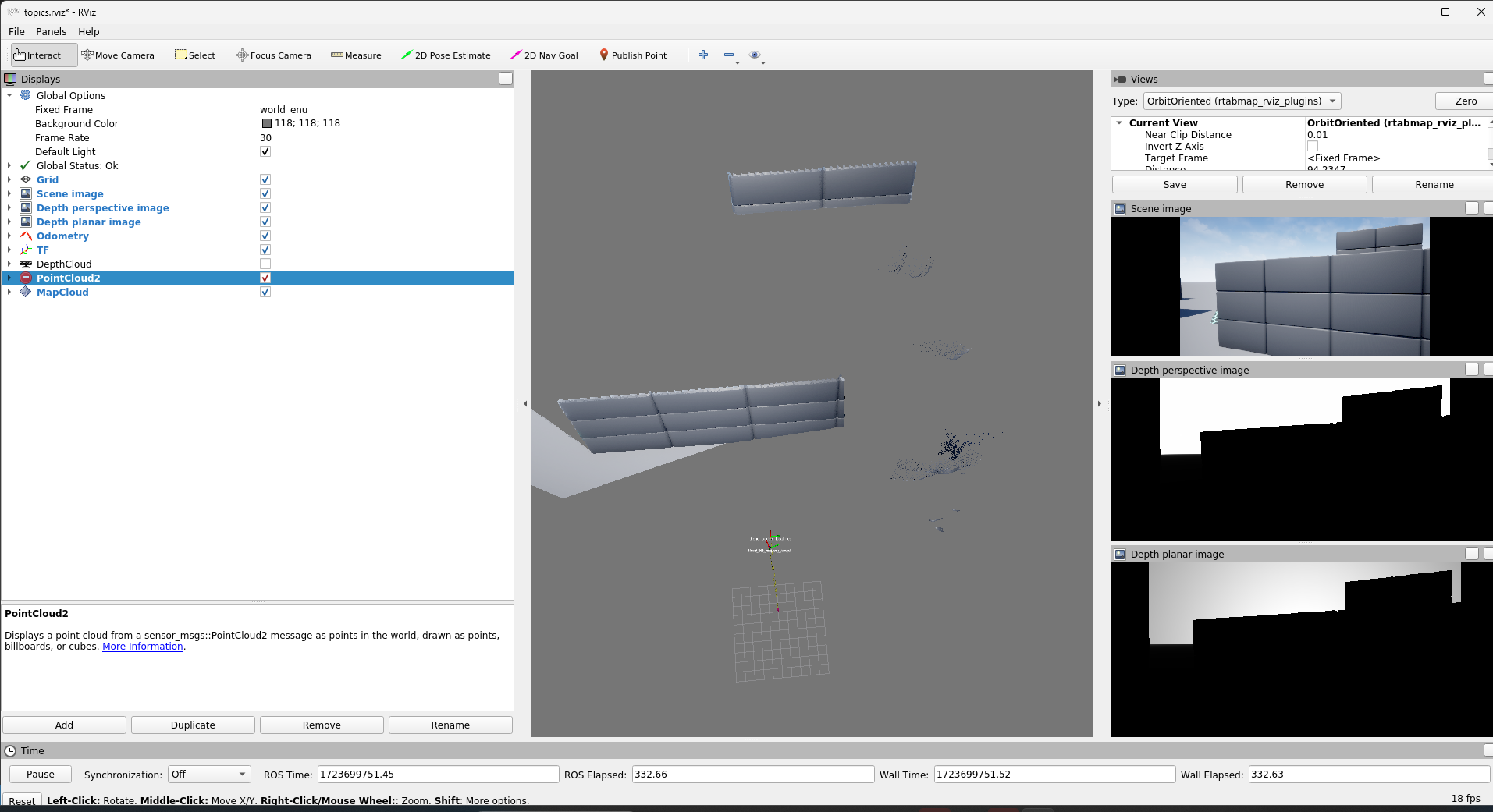
The points from the map generated by RTAB-Map appear in the wrong places, and they are published very sporadically, never in the same location.
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10365.html
Here is the rosbag again. I made some changes, such as adding the following line to my launcher:
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_map" args="0 0 0 0 0 0 front_left_custom_optical map" />
As you suggested, I was able to fully visualize the data with RViz. However, I must be publishing something incorrectly or using RTAB-Map the wrong way because it looks like this:
The points from the map generated by RTAB-Map appear in the wrong places, and they are published very sporadically, never in the same location.
| Free forum by Nabble | Edit this page |