Re: Integrate external markers from apriltag_ros with Priors
Posted by fboris on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Integrate-external-markers-from-apriltag-ros-with-Priors-tp10358p10366.html
Hi Mathieu,
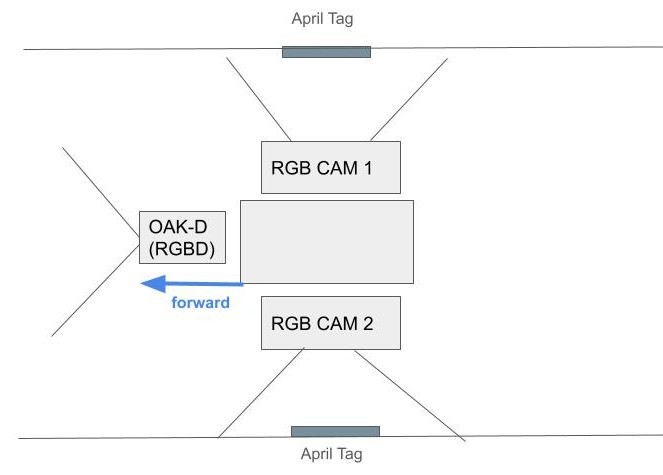
above digram is what sensors layout on my robot.
I would like to use front rgdb cam (oak-d) as rgbd-slam for rtabmap.
Due to the limitation of installation of tags. I need to use camera on the side(normal rgb camera not rgdbd) to detect tags and contraint the map of rtabmap.
Also, making camera point to the tag get better marker detection result. It is reason I need to use apriltag_ros to get detections and define prior of tags.
Or do you have any better suggestions? But again, thanks for your reply.
Best,
fboris
URL: http://official-rtab-map-forum.206.s1.nabble.com/Integrate-external-markers-from-apriltag-ros-with-Priors-tp10358p10366.html
Hi Mathieu,
above digram is what sensors layout on my robot.
I would like to use front rgdb cam (oak-d) as rgbd-slam for rtabmap.
Due to the limitation of installation of tags. I need to use camera on the side(normal rgb camera not rgdbd) to detect tags and contraint the map of rtabmap.
Also, making camera point to the tag get better marker detection result. It is reason I need to use apriltag_ros to get detections and define prior of tags.
Or do you have any better suggestions? But again, thanks for your reply.
Best,
fboris
| Free forum by Nabble | Edit this page |