Re: rtabmap ros2 zed2i
Posted by hoffer on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros2-zed2i-tp10335p10379.html
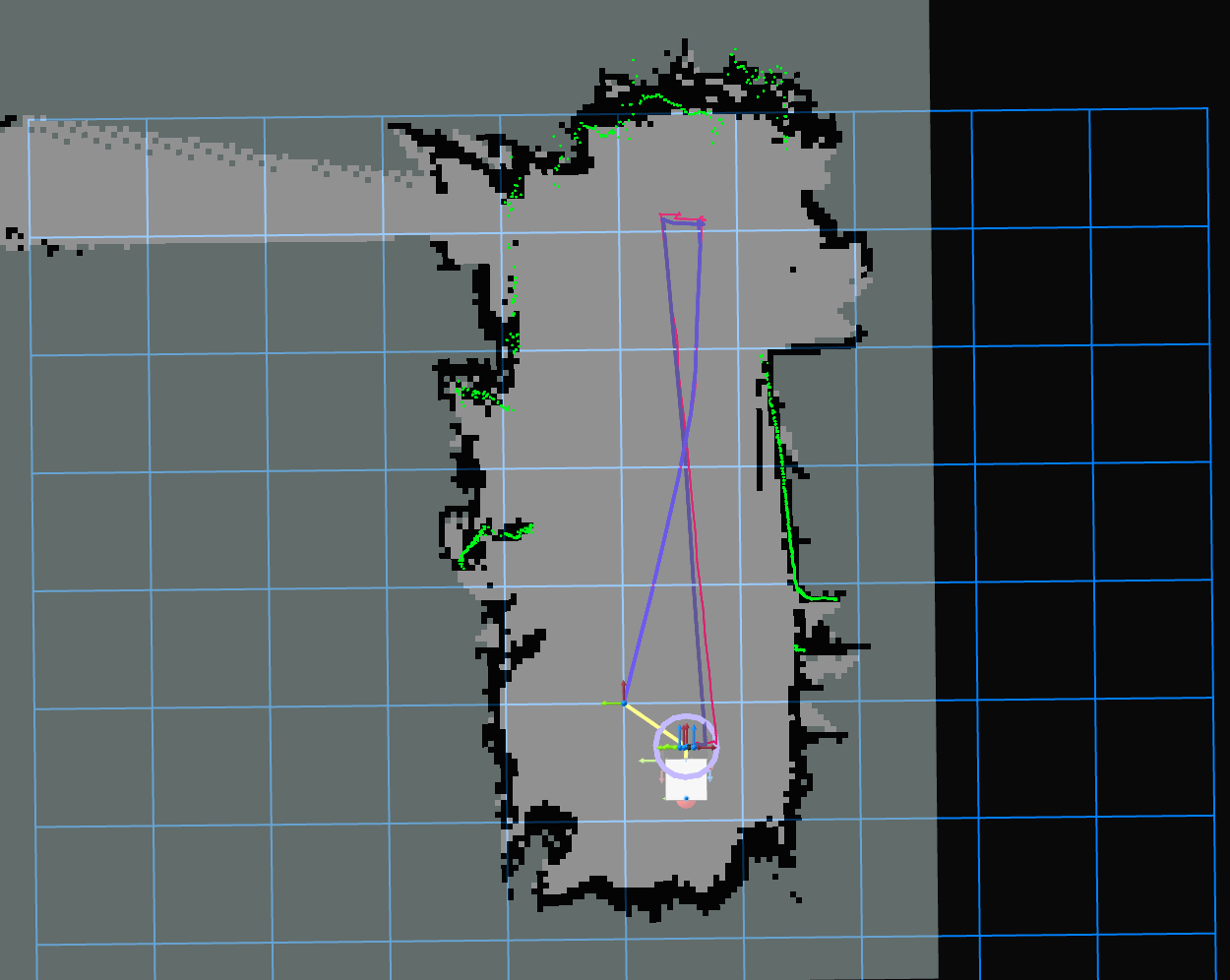
Thanks a lot Mathieu. With these settings changes I've gotten past these errors but not stuck not being able to create loop closures. When I do a loop in my office, right about where I come back to where I started, I get loop closure rejections where there should be a loop closure. I am also using depthimage_to_laserscan with subscribe_scan:=true for better occupancy grid generation. Attached my map as it appears before these loop closure errors. Any ideas?
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros2-zed2i-tp10335p10379.html
Thanks a lot Mathieu. With these settings changes I've gotten past these errors but not stuck not being able to create loop closures. When I do a loop in my office, right about where I come back to where I started, I get loop closure rejections where there should be a loop closure. I am also using depthimage_to_laserscan with subscribe_scan:=true for better occupancy grid generation. Attached my map as it appears before these loop closure errors. Any ideas?
[rtabmap-18] [ WARN] (2024-08-16 10:53:18.067) Rtabmap.cpp:3844::process() Rejecting all added loop closures (1, first is 180 <-> 26) in this iteration because a wrong loop closure has been detected after graph optimization, resulting in a maximum graph error ratio of 11.933435 (edge 26->180, type=1, abs error=53.889996 deg, stddev=0.078817). The maximum error ratio parameter "RGBD/OptimizeMaxError" is 3.000000 of std deviation. [rtabmap-18] [ WARN] (2024-08-16 10:53:18.067) Rtabmap.cpp:3882::process() Loop closure 180->26 rejected! [rtabmap-18] [ WARN] (2024-08-16 10:53:19.327) Rtabmap.cpp:3807::process() Rejecting all added loop closures (1, first is 181 <-> 23) in this iteration because a wrong loop closure has been detected after graph optimization, resulting in a maximum graph error ratio of 135.697876 (edge 23->181, type=1, abs error=2.591433 m, stddev=0.019097). The maximum error ratio parameter "RGBD/OptimizeMaxError" is 3.000000 of std deviation.
| Free forum by Nabble | Edit this page |