Tilted 3D map with floam
Posted by nugu_ on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Tilted-3D-map-with-floam-tp10380.html
Hi,
I’m using an ouster os0-64-U and aim to 3D-map an unknown indoor environment with simultaneous localization. Therefore, I use rtabmap’s icp_odometry with floam and the robot_localization package. Currently everything is working quite well, but the generated 3D-map is tilted:
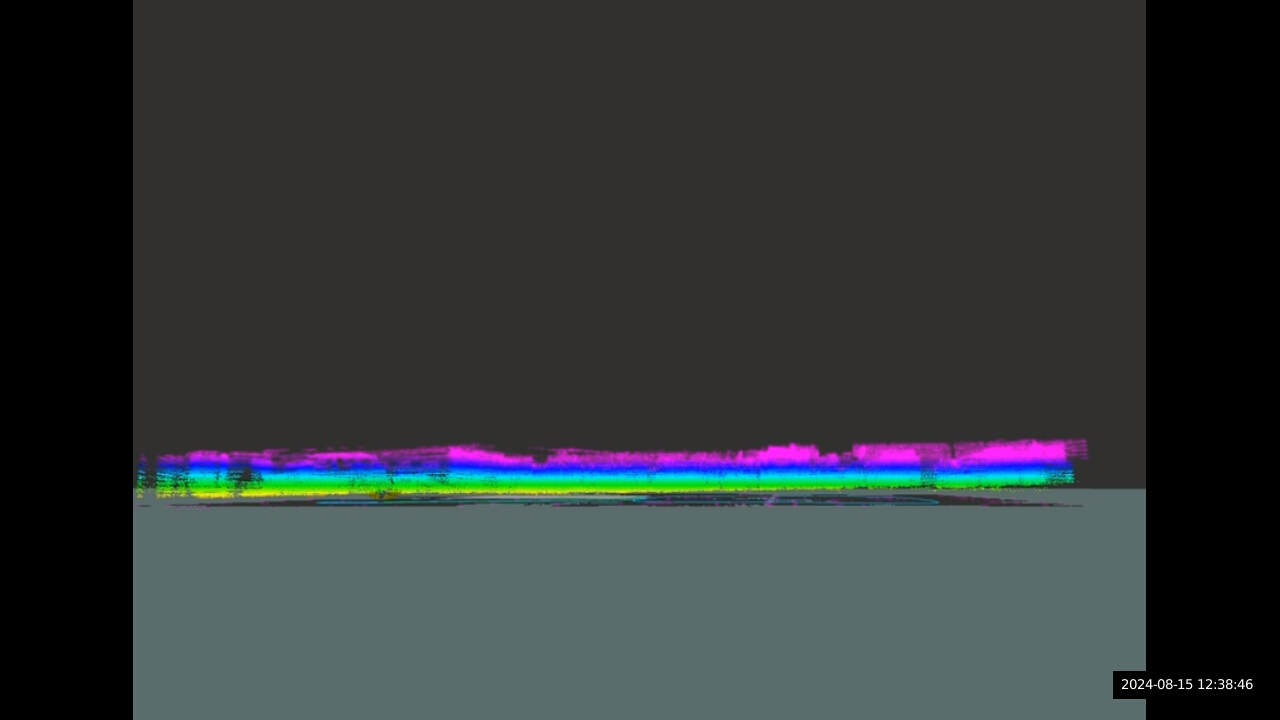
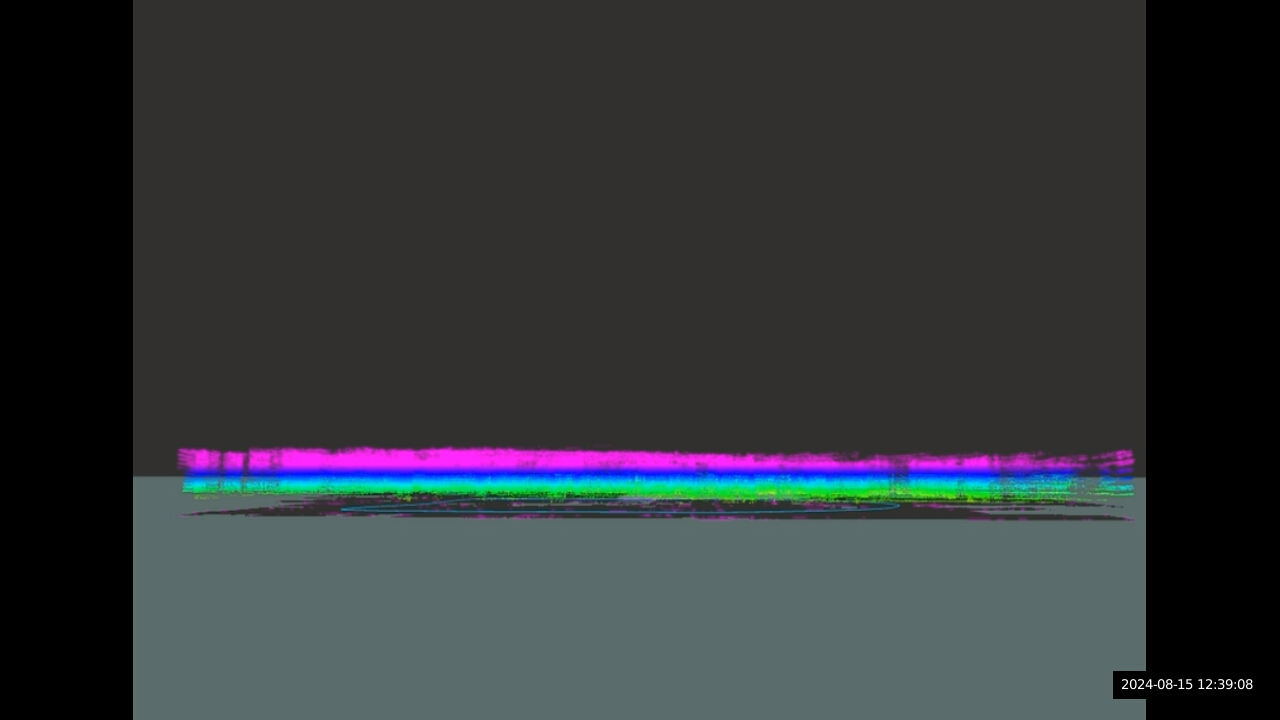
Also, the odometry by icp_odmetry is off as the robot model lifts off by up to 60cm from the ground in rviz. This problem seems to have the same cause as the tilted map, as the maximum robot liftoff happens where the 3D map also lifts furthest off the ground. (far right in the first picture, far left in the second picture)
My launch file for mapping and localization:
launch_rtabmap_test.launch
My config file for icp_odometry
cfg_icp_odom.yaml
My config file for rtabmap:
cfg_rtabmap_mapping.yaml
I already looked at: this thread in the forum and the test_outser_launch files on github.
I assume the problem comes from not deskewing the point cloud of the ouster. I was not able to make the deskewing run reasonably, I always faced some transform or frame issues. In the launch file you can see my approach to deskewing commented. I couldn’t figure out which frames to use for the fixed and base frame of the imu_to_tf. I feel like there is something slightly off with my tf.
My tf_tree:
frames.png
Rosbag: Rosbag
I’m grateful for any type of help! Thank you!
URL: http://official-rtab-map-forum.206.s1.nabble.com/Tilted-3D-map-with-floam-tp10380.html
Hi,
I’m using an ouster os0-64-U and aim to 3D-map an unknown indoor environment with simultaneous localization. Therefore, I use rtabmap’s icp_odometry with floam and the robot_localization package. Currently everything is working quite well, but the generated 3D-map is tilted:
Also, the odometry by icp_odmetry is off as the robot model lifts off by up to 60cm from the ground in rviz. This problem seems to have the same cause as the tilted map, as the maximum robot liftoff happens where the 3D map also lifts furthest off the ground. (far right in the first picture, far left in the second picture)
My launch file for mapping and localization:
launch_rtabmap_test.launch
My config file for icp_odometry
cfg_icp_odom.yaml
My config file for rtabmap:
cfg_rtabmap_mapping.yaml
I already looked at: this thread in the forum and the test_outser_launch files on github.
I assume the problem comes from not deskewing the point cloud of the ouster. I was not able to make the deskewing run reasonably, I always faced some transform or frame issues. In the launch file you can see my approach to deskewing commented. I couldn’t figure out which frames to use for the fixed and base frame of the imu_to_tf. I feel like there is something slightly off with my tf.
My tf_tree:
frames.png
Rosbag: Rosbag
I’m grateful for any type of help! Thank you!
| Free forum by Nabble | Edit this page |