Re: Lidar based 3d SLAM in sparse feature environment
Posted by Gi_T on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-based-3d-SLAM-in-sparse-feature-environment-tp10174p10411.html
Hi Mathieu,
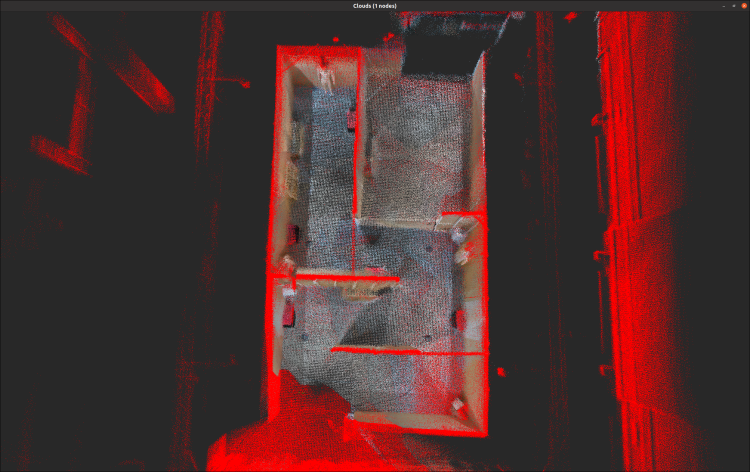
sorry for not posting any major updates for a while. Our team participated in a drone competition last week and achieved really good results. SLAM via RTABMAP worked quite well for the environment as we made two major changes to our setup. We tilted the LIDAR up and the camera (Intel Realsense) down and then merged the PointClouds before feeding them into RTABMAP. This allowed us to always see the floor solving our Z issues.
Again many thanks for all the help.
Cheers,
Gilbert
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-based-3d-SLAM-in-sparse-feature-environment-tp10174p10411.html
Hi Mathieu,
sorry for not posting any major updates for a while. Our team participated in a drone competition last week and achieved really good results. SLAM via RTABMAP worked quite well for the environment as we made two major changes to our setup. We tilted the LIDAR up and the camera (Intel Realsense) down and then merged the PointClouds before feeding them into RTABMAP. This allowed us to always see the floor solving our Z issues.
Again many thanks for all the help.
Cheers,
Gilbert
| Free forum by Nabble | Edit this page |