Re: cv::Exception Airsim implementation
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10421.html
Hi,
To visualize in rviz with MapCloud display, you should set "Cloud max depth" to 0 and set "Cloud voxel size" to 0.
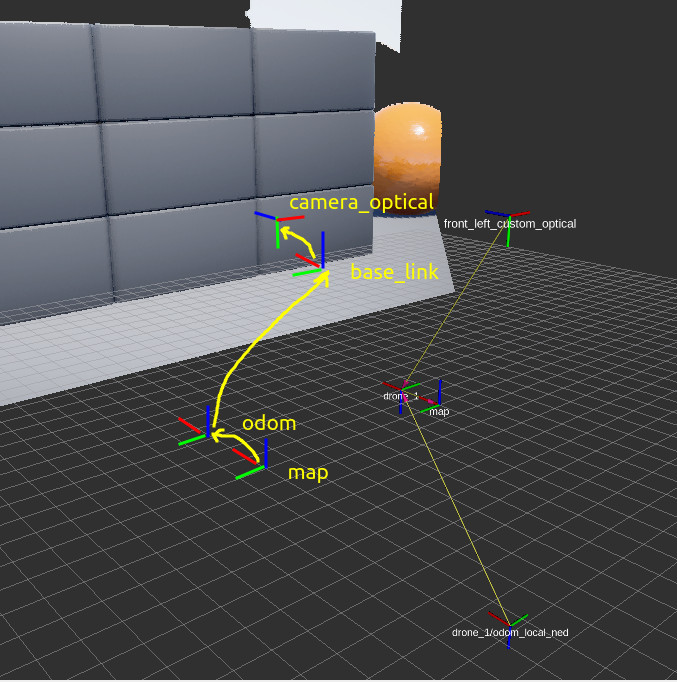
To fix your TF tree issues, try to get frames in ROS standard (see REP105), because it super hard to understand each other. Below is the current TF and the expected one based on ROS standard frames. Change "drone_1" to "odom" and make it x=forward, y=left, z=up. The base frame on the drone on which odom is attached should be in ROS coordinates x=forward, y=left and z=up (like odom and map frames). For the frame of the depth/rgb image topics, create a static transform of ypr=-Pi/2 0 -Pi/2 to link base_link to front_left_custom_optical.
rtabmap sohuld then use "base_link" as frame_id and "odom" as odom_frame_id. The result MapCloud will then appear correctly. Note that rtabmap will publish map->odom, you should not publish it yourself as fixed transform.
URL: http://official-rtab-map-forum.206.s1.nabble.com/cv-Exception-Airsim-implementation-tp10281p10421.html
Hi,
To visualize in rviz with MapCloud display, you should set "Cloud max depth" to 0 and set "Cloud voxel size" to 0.
To fix your TF tree issues, try to get frames in ROS standard (see REP105), because it super hard to understand each other. Below is the current TF and the expected one based on ROS standard frames. Change "drone_1" to "odom" and make it x=forward, y=left, z=up. The base frame on the drone on which odom is attached should be in ROS coordinates x=forward, y=left and z=up (like odom and map frames). For the frame of the depth/rgb image topics, create a static transform of ypr=-Pi/2 0 -Pi/2 to link base_link to front_left_custom_optical.
rtabmap sohuld then use "base_link" as frame_id and "odom" as odom_frame_id. The result MapCloud will then appear correctly. Note that rtabmap will publish map->odom, you should not publish it yourself as fixed transform.
| Free forum by Nabble | Edit this page |