Re: Integrate external markers from apriltag_ros with Priors
Posted by fboris on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Integrate-external-markers-from-apriltag-ros-with-Priors-tp10358p10425.html
Hi Mathieu,
Later, I update another test to check "Mem/ReduceGraph true". Complete args : " -Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3 --Kp/DetectorStrategy 11 --Vis/FeatureType 11 --RGBD/MarkerDetection false --Optimizer/PriorsIgnored false --VhEp/Enabled false --Mem/UseOdometryFeatures=True --Rtabmap/DetectionRate 1 --RGBD/OptimizeMaxError 0 --Optimizer/Strategy 2 --RGBD/OptimizeRobust true --Rtabmap/TimeThr 200 --RGBD/OptimizeFromGraphEnd true --Mem/ReduceGraph true".
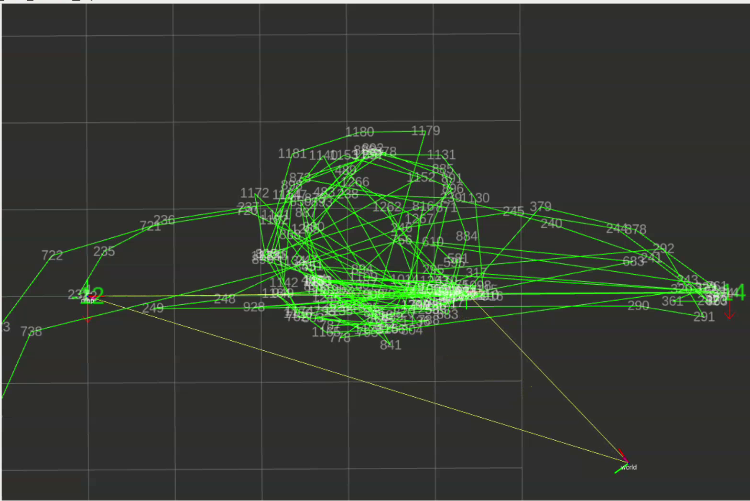
The result of localization is more accurate. And You can see the graph preserve node around landmark. I think because I was keeping walking same space. rtabmap didn't add more node in WM(this part im no sure, may need you to clarify). My assumption is rtabmap pose graph in second test might be:
1) better geometric distribution, so optimization of WM will be more precise( compare with Sep 03, 2024 post)
2) landmarks are in the pose graph(with Prior). So those prior marker constraint the error.
But again, This part may need your clarification. It is why I have idea: Is it possible to keep all the landmarks in WM? So rtabmap localization output will be always precise even we do memory management.
Here is second test db file(https://drive.google.com/file/d/1zWSPW8aoGDNBsY78gysNuixARCR5cfZL/view?usp=sharing).
URL: http://official-rtab-map-forum.206.s1.nabble.com/Integrate-external-markers-from-apriltag-ros-with-Priors-tp10358p10425.html
Hi Mathieu,
Later, I update another test to check "Mem/ReduceGraph true". Complete args : " -Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3 --Kp/DetectorStrategy 11 --Vis/FeatureType 11 --RGBD/MarkerDetection false --Optimizer/PriorsIgnored false --VhEp/Enabled false --Mem/UseOdometryFeatures=True --Rtabmap/DetectionRate 1 --RGBD/OptimizeMaxError 0 --Optimizer/Strategy 2 --RGBD/OptimizeRobust true --Rtabmap/TimeThr 200 --RGBD/OptimizeFromGraphEnd true --Mem/ReduceGraph true".
The result of localization is more accurate. And You can see the graph preserve node around landmark. I think because I was keeping walking same space. rtabmap didn't add more node in WM(this part im no sure, may need you to clarify). My assumption is rtabmap pose graph in second test might be:
1) better geometric distribution, so optimization of WM will be more precise( compare with Sep 03, 2024 post)
2) landmarks are in the pose graph(with Prior). So those prior marker constraint the error.
But again, This part may need your clarification. It is why I have idea: Is it possible to keep all the landmarks in WM? So rtabmap localization output will be always precise even we do memory management.
Here is second test db file(https://drive.google.com/file/d/1zWSPW8aoGDNBsY78gysNuixARCR5cfZL/view?usp=sharing).
| Free forum by Nabble | Edit this page |