Re: Configure path planning
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Configure-path-planning-tp10430p10439.html
When use_action_for_goal is true, it means rtabmap will connect to nav2 action server to publish the goals. If use_action_for_goal is false, then only the topic "goal_out" would be published by rtabmap node when requesting a plan. You can doublecheck if that parameter is correctly enabled/disabled by calling:
Note sure /labels would fix your issue. That topic purpose is mostly to visualize labels and node ids on Rviz as markers (when combining with MapGraph display). When playing with labels, it would more convenient to use list_labels and set_label services. Then use set_goal service by setting a label instead of a node_id.
I still think having a node subscribing to global_path, and just republishing the last goal in that path to nav2 would do what you want.
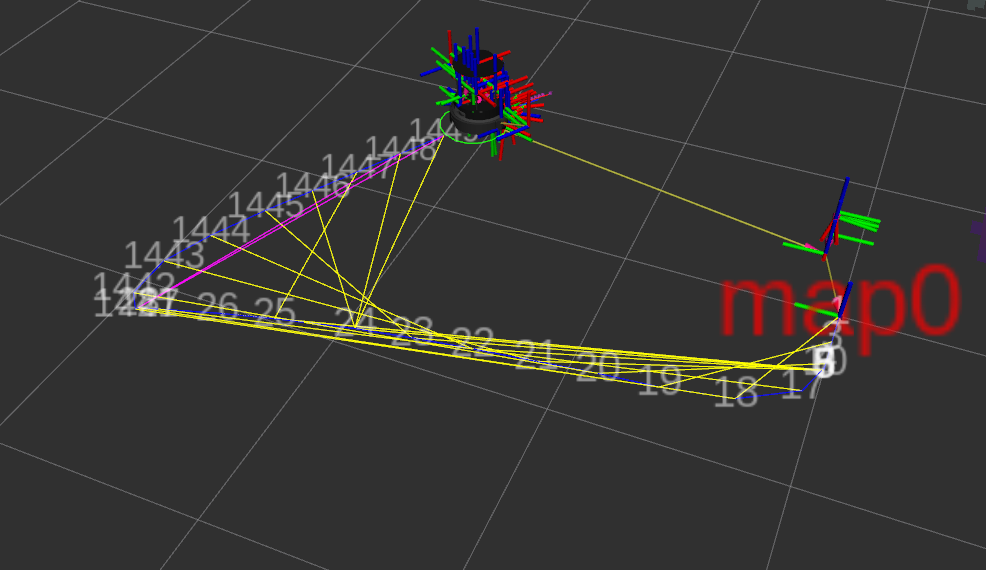
The poses look pretty close. Showing MapGraph and labels at same time:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Configure-path-planning-tp10430p10439.html
It could if you remapped rtabmap's "goal_out" topic to input "goal_pose" topic of nav2. The global_path is not connected to nav2, so if it is on your setup, it is by coincidence. With this turtlebot4 demo, it is connected to nav2:
ros2 topic info --verbose /global_path Type: nav_msgs/msg/Path Publisher count: 1 Node name: rtabmap Node namespace: / Topic type: nav_msgs/msg/Path Endpoint type: PUBLISHER GID: 01.0f.70.28.87.4d.88.b6.00.00.00.00.00.00.37.03.00.00.00.00.00.00.00.00 QoS profile: Reliability: RELIABLE History (Depth): UNKNOWN Durability: VOLATILE Lifespan: Infinite Deadline: Infinite Liveliness: AUTOMATIC Liveliness lease duration: Infinite Subscription count: 1 Node name: rtabmap_viz Node namespace: / Topic type: nav_msgs/msg/Path Endpoint type: SUBSCRIPTION GID: 01.0f.70.28.89.4d.2f.a6.00.00.00.00.00.00.37.04.00.00.00.00.00.00.00.00 QoS profile: Reliability: RELIABLE History (Depth): UNKNOWN Durability: VOLATILE Lifespan: Infinite Deadline: Infinite Liveliness: AUTOMATIC Liveliness lease duration: Infinite
When use_action_for_goal is true, it means rtabmap will connect to nav2 action server to publish the goals. If use_action_for_goal is false, then only the topic "goal_out" would be published by rtabmap node when requesting a plan. You can doublecheck if that parameter is correctly enabled/disabled by calling:
ros2 param get /rtabmap use_action_for_goal Boolean value is: False
Note sure /labels would fix your issue. That topic purpose is mostly to visualize labels and node ids on Rviz as markers (when combining with MapGraph display). When playing with labels, it would more convenient to use list_labels and set_label services. Then use set_goal service by setting a label instead of a node_id.
$ ros2 service call /rtabmap/set_goal rtabmap_msgs/srv/SetGoal "{node_label: map0}"
waiting for service to become available...
requester: making request: rtabmap_msgs.srv.SetGoal_Request(node_id=0, node_label='map0', frame_id='')
response:
rtabmap_msgs.srv.SetGoal_Response(path_ids=[28, 18, 1], path_poses=[
geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=-1.1560359001159668, y=2.9091389179229736, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.8471848224432924, w=0.5312983546970538)),
geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=-0.6467797756195068, y=0.3061254024505615, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.7951843455749338, w=0.606367957054416)),
geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.01847362518310547, y=0.001550436019897461, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=-0.00019708280454233746, w=0.9999999850988387))], planning_time=0.000640869140625)
I still think having a node subscribing to global_path, and just republishing the last goal in that path to nav2 would do what you want.
I tested it here:
$ ros2 service call /rtabmap/set_goal rtabmap_msgs/srv/SetGoal "{node_id: 18}"
waiting for service to become available...
requester: making request: rtabmap_msgs.srv.SetGoal_Request(node_id=18, node_label='', frame_id='')
response:
rtabmap_msgs.srv.SetGoal_Response(path_ids=[28, 18], path_poses=[
geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=-1.1560359001159668, y=2.9091389179229736, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.8471848224432924, w=0.5312983546970538)),
geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=-0.6467797756195068, y=0.3061254024505615, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.7951843455749338, w=0.606367957054416))], planning_time=0.0007572174072265625)
ros2 topic echo /labels
markers:
[...]
- header:
stamp:
sec: 1221
nanosec: 954000000
frame_id: map
ns: ids
id: 18
type: 9
action: 0
pose:
position:
x: -0.6494603157043457
y: 0.3056384325027466
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
scale:
x: 1.0
y: 1.0
z: 0.2
color:
r: 1.0
g: 1.0
b: 1.0
a: 0.5
lifetime:
sec: 2
nanosec: 0
frame_locked: false
points: []
colors: []
texture_resource: ''
texture:
header:
stamp:
sec: 0
nanosec: 0
frame_id: ''
format: ''
data: []
uv_coordinates: []
text: '18'
mesh_resource: ''
mesh_file:
filename: ''
data: []
mesh_use_embedded_materials: false
[...]
- header:
stamp:
sec: 1221
nanosec: 954000000
frame_id: map
ns: ids
id: 28
type: 9
action: 0
pose:
position:
x: -1.1560359001159668
y: 2.9091389179229736
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
scale:
x: 1.0
y: 1.0
z: 0.2
color:
r: 1.0
g: 1.0
b: 1.0
a: 0.5
lifetime:
sec: 2
nanosec: 0
frame_locked: false
points: []
colors: []
texture_resource: ''
texture:
header:
stamp:
sec: 0
nanosec: 0
frame_id: ''
format: ''
data: []
uv_coordinates: []
text: '28'
mesh_resource: ''
mesh_file:
filename: ''
data: []
mesh_use_embedded_materials: false
The poses look pretty close. Showing MapGraph and labels at same time:
| Free forum by Nabble | Edit this page |