Re: rtabmap process error
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-process-error-tp1031p1044.html
Hi,
I've looked at your rosbag you sent me. Tip: Note that you can compress the rosbag for convenience before sharing it. Here is the rosbag info (the relevant info):
You ran rtabmap at the same time as taking the rosbag, I removed all /map and /odom tf from the bag before replaying it. I used the python script here for that.
I did a first test with the indigo binaries (0.10.10), and rtabmapviz is crashing but not rtabmap. So I unsintalled the binaries and installed rtabmap 0.10.12 (latest master) from source. rtabmapviz was not crashing anymore and the mapping went well, here is the final result:
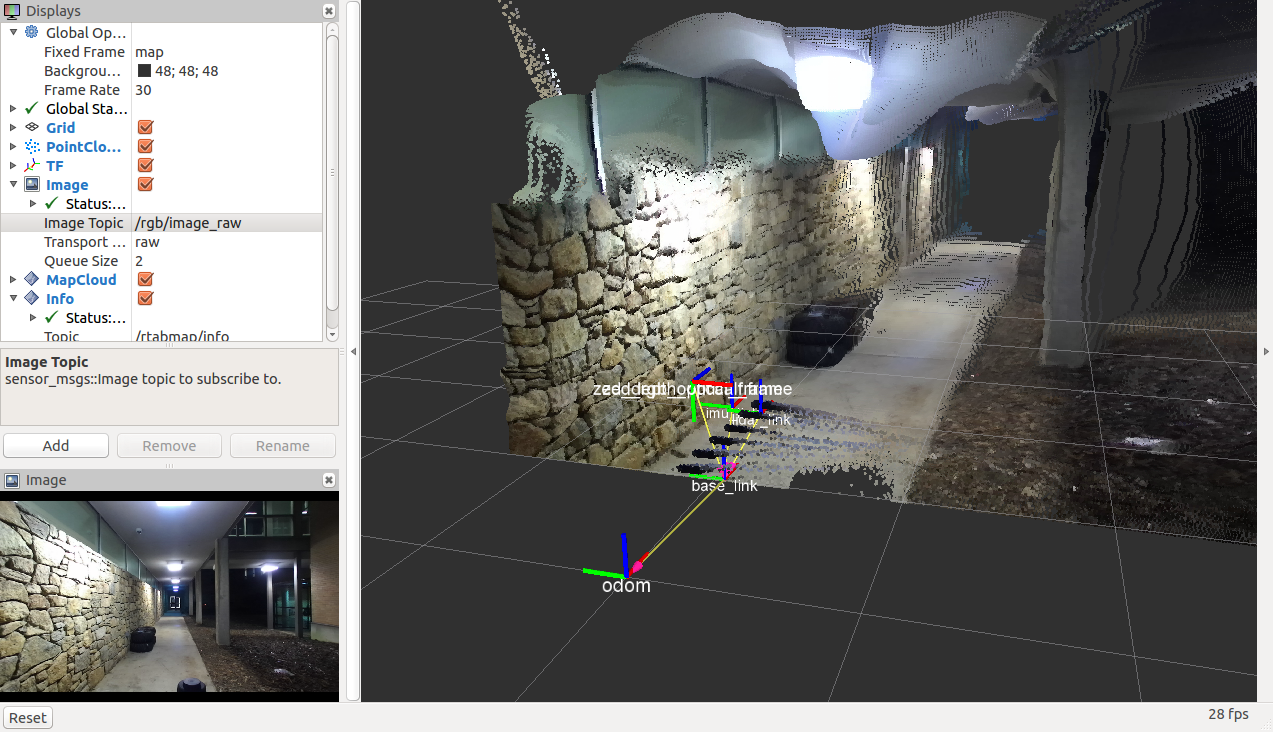
The robot moved approximately 1 meter. The commands I used with the rosbag:
You may receive some warnings like that about tf (note that I've just updated the code with the latest warning):
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-process-error-tp1031p1044.html
Hi,
I've looked at your rosbag you sent me. Tip: Note that you can compress the rosbag for convenience before sharing it. Here is the rosbag info (the relevant info):
rosbag info input.bag
path: input.bag
version: 2.0
duration: 1:03s (63s)
...
topics: /camera/depth/camera_info 330 msgs : sensor_msgs/CameraInfo
/camera/rgb/camera_info 330 msgs : sensor_msgs/CameraInfo
/depth/image_raw 330 msgs : sensor_msgs/Image
/rgb/image_raw 328 msgs : sensor_msgs/Image
/scan 383 msgs : sensor_msgs/LaserScan
/tf 2542 msgs : tf2_msgs/TFMessage
You ran rtabmap at the same time as taking the rosbag, I removed all /map and /odom tf from the bag before replaying it. I used the python script here for that.
I did a first test with the indigo binaries (0.10.10), and rtabmapviz is crashing but not rtabmap. So I unsintalled the binaries and installed rtabmap 0.10.12 (latest master) from source. rtabmapviz was not crashing anymore and the mapping went well, here is the final result:
The robot moved approximately 1 meter. The commands I used with the rosbag:
$ roscore $ rosparam set use_sim_time true $ roslaunch rtabmap_ros rtabmap.launch rgb_topic:=/rgb/image_raw depth_topic:=/depth/image_raw camera_info_topic:=/camera/rgb/camera_info subscribe_scan:=true frame_id:=/base_link rtabmap_args:="--delete_db_on_start" rtabmapviz:=false rviz:=true $ rosbag play --clock output.bag
You may receive some warnings like that about tf (note that I've just updated the code with the latest warning):
[ WARN] [1454433611.618708826, 1454372119.478533730]: rtabmap: Could not get transform from odom to /base_link after 0.100000 second! [ WARN] [1454433611.618766026, 1454372119.478533730]: Could not get odometry value for laser scan stamp (1454372118.275979s). Latest odometry stamp is 1454372118.213435s. The laser scan pose will not be synchronized with odometry.Setting "wait_for_transform" higher or increasing /scan frame rate may help to better synchronize the messages.
cheers
| Free forum by Nabble | Edit this page |