Re: How to utilize D455 sensor to colorize 3d point cloud map created using lidar
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-utilize-D455-sensor-to-colorize-3d-point-cloud-map-created-using-lidar-tp10438p10442.html
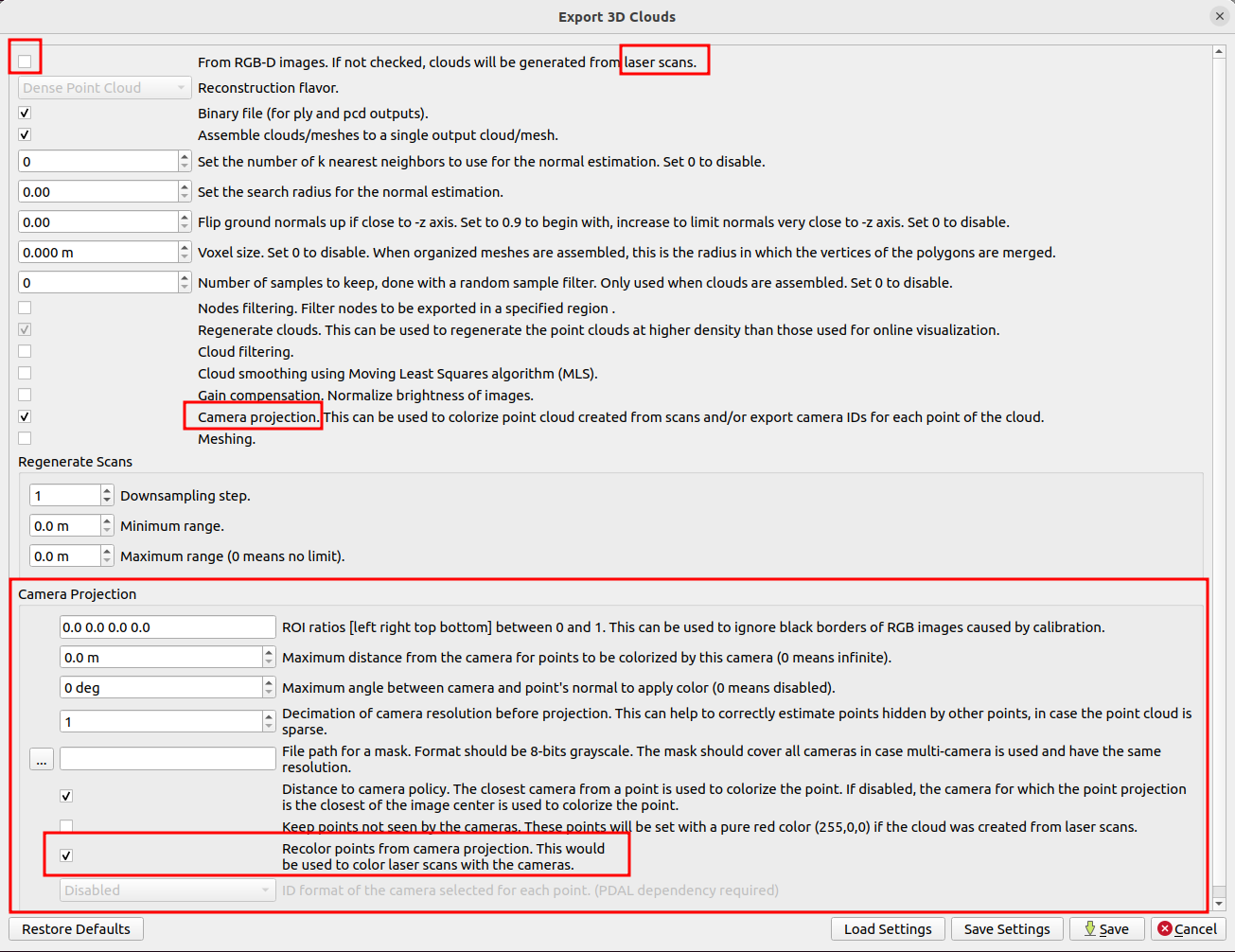
If you feed the lidar point cloud and the camera RGB image to rtabmap, it is possible to colorize the lidar point cloud in post-processing.
For example, after opening the database in standalone RTAB-Map or rtabmap-databaseViewer, you can do File->Export clouds... and choose this config:
Some examples:
* http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9220.html
* slightly different approach that could color online the lidar point cloud: http://official-rtab-map-forum.206.s1.nabble.com/Multi-monocular-cameras-tp9383p9396.html
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-utilize-D455-sensor-to-colorize-3d-point-cloud-map-created-using-lidar-tp10438p10442.html
If you feed the lidar point cloud and the camera RGB image to rtabmap, it is possible to colorize the lidar point cloud in post-processing.
For example, after opening the database in standalone RTAB-Map or rtabmap-databaseViewer, you can do File->Export clouds... and choose this config:
Some examples:
* http://official-rtab-map-forum.206.s1.nabble.com/Livox-Avia-Depth-cameras-and-organized-point-clouds-tp9200p9220.html
* slightly different approach that could color online the lidar point cloud: http://official-rtab-map-forum.206.s1.nabble.com/Multi-monocular-cameras-tp9383p9396.html
| Free forum by Nabble | Edit this page |