Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
Posted by grzegorz on
URL: http://official-rtab-map-forum.206.s1.nabble.com/We-are-receiving-imu-data-buffer-37-but-cannot-interpolate-imu-transform-at-time-IMU-won-t-be-added--tp10510p10567.html
I am trying to launch it all together on raspberry pi 5: um7 imu driver, madgwick filter, driver for 2 rpi module 3 cameras, rtabmap stereo odometry and rtabmap slam.
Probably this delay is somehow related to system throughput. For now, I have cameras at 30Hz and IMU at 60 Hz (unfortunately this is max I could achieve for IMU).
For now I did a synchronization between IMU and cameras, and indeed the warning isn't happening! Thank you for that!
Nevertheless, there is still a problem with slow localization estimation and map is scattered, and one object from real world appears in multiple places, like on the photo:
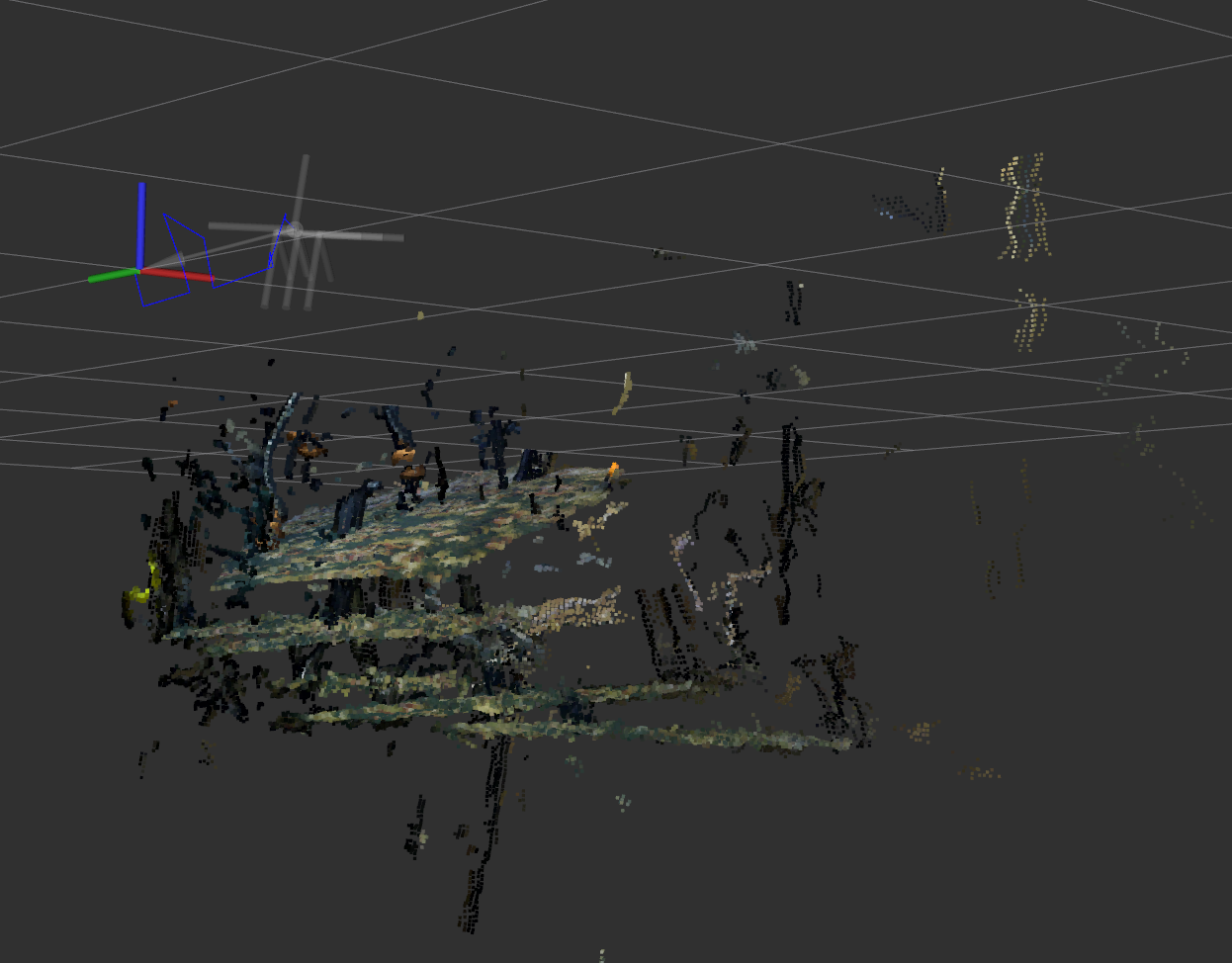
I followed the advanced tuning tutorial (https://wiki.ros.org/rtabmap_ros/Tutorials/Advanced%20Parameter%20Tuning) to increase a speed and reduce a pointcloud, and also a tutorial for stereo handheld mapping, but the problem still occurs.
URL: http://official-rtab-map-forum.206.s1.nabble.com/We-are-receiving-imu-data-buffer-37-but-cannot-interpolate-imu-transform-at-time-IMU-won-t-be-added--tp10510p10567.html
I am trying to launch it all together on raspberry pi 5: um7 imu driver, madgwick filter, driver for 2 rpi module 3 cameras, rtabmap stereo odometry and rtabmap slam.
Probably this delay is somehow related to system throughput. For now, I have cameras at 30Hz and IMU at 60 Hz (unfortunately this is max I could achieve for IMU).
For now I did a synchronization between IMU and cameras, and indeed the warning isn't happening! Thank you for that!
Nevertheless, there is still a problem with slow localization estimation and map is scattered, and one object from real world appears in multiple places, like on the photo:
I followed the advanced tuning tutorial (https://wiki.ros.org/rtabmap_ros/Tutorials/Advanced%20Parameter%20Tuning) to increase a speed and reduce a pointcloud, and also a tutorial for stereo handheld mapping, but the problem still occurs.
| Free forum by Nabble | Edit this page |