Re: stereo example
Posted by noone on
URL: http://official-rtab-map-forum.206.s1.nabble.com/stereo-example-tp10512p10580.html
i made the calibration
( NOTE : before with my matlab calibration it does not make the same results left like right and they are already close in results in mat lab )
NOTE the suqare size is 15 mm which means 0.015 m but for some reason it made it 0.0153 m
the code prints the following
Using single stereo camera (device=0)
Camera initialized successfully
Stereo model:
Baseline: 0.060000
Left fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488
Right fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488
Image size: 1920x1080
Press ESC to quit, 'r' to start/stop recording.
[FATAL] (2024-10-18 19:25:04) OptimizerG2O.cpp:1906::rtabmap::OptimizerG2O::optimizeBA() Condition (optimizer.verifyInformationMatrices()) not met!
it open the cameras but then crash i dont know why
the new calibration by RTAB-map
%YAML:1.0
---
camera_name: "00000001_right"
image_width: 1920
image_height: 1080
camera_matrix:
rows: 3
cols: 3
data: [ 1.0359770426766943e+03, 0., 9.6065890354473777e+02, 0.,
1.0394423273915493e+03, 5.5087654755310905e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 2.4355626441227931e-02, -3.3584440811797761e-02,
3.6038494845013081e-03, 1.1131878223688239e-04,
6.5387006260538370e-03 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9895843991392885e-01, 8.3642089290527615e-03,
-4.4856162717296755e-02, -8.2896391727531969e-03,
9.9996393240717651e-01, 1.8481794180737676e-03,
4.4870003422275380e-02, -1.4744130245592985e-03,
9.9899174616165765e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03,
-6.5676209817282739e+01, 0., 1.0946034969547125e+03,
5.5364748764038086e+02, 0., 0., 0., 1., 0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
%YAML:1.0
---
camera_name: "00000001_left"
image_width: 1920
image_height: 1080
camera_matrix:
rows: 3
cols: 3
data: [ 1.0379835606151807e+03, 0., 9.6982079338221376e+02, 0.,
1.0415162275006037e+03, 5.4585387782143107e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 2.8774425005461009e-02, -5.1330312743177994e-02,
2.5710449115585476e-03, 1.4016719035248263e-03,
2.2524994617530224e-02 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9959277633679888e-01, 6.1221381808933394e-03,
-2.7871148512115407e-02, -6.1684487373559948e-03,
9.9997973315311695e-01, -1.5759197935309851e-03,
2.7860935653078053e-02, 1.7471997925479824e-03,
9.9961028183858724e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03, 0., 0.,
1.0946034969547125e+03, 5.5364748764038086e+02, 0., 0., 0., 1.,
0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
%YAML:1.0
---
camera_name: "00000001"
rotation_matrix:
rows: 3
cols: 3
data: [ 9.9985289489103091e-01, -2.0953127011127987e-03,
1.7023461537229983e-02, 2.1514980425922209e-03,
9.9999229703997661e-01, -3.2828214821735832e-03,
-1.7016451868639215e-02, 3.3189645065372286e-03,
9.9984970112532745e-01 ]
translation_matrix:
rows: 3
cols: 1
data: [ -5.9937506394835721e-02, -5.0185253574318279e-04,
2.6913697630378953e-03 ]
essential_matrix:
rows: 3
cols: 3
data: [ 2.6980496974639483e-06, -2.6428397889900752e-03,
-4.8375758123200374e-04, 1.6399160033566383e-03,
1.8968989229530586e-04, 5.8856903502701279e-02,
3.6587703005706233e-04, -5.8821360250764100e-02,
2.0148221832101199e-04 ]
fundamental_matrix:
rows: 3
cols: 3
data: [ -5.2967938474355944e-09, 5.1708078139017699e-06,
-1.8315854186840529e-03, -3.2087395187436668e-06,
-3.6989757433487991e-07, -1.1622274507719302e-01,
1.0285784656178713e-03, 1.1446287425398083e-01,
9.9999999999999989e-01 ]
screen shot of the calibration , i dont know about the warning
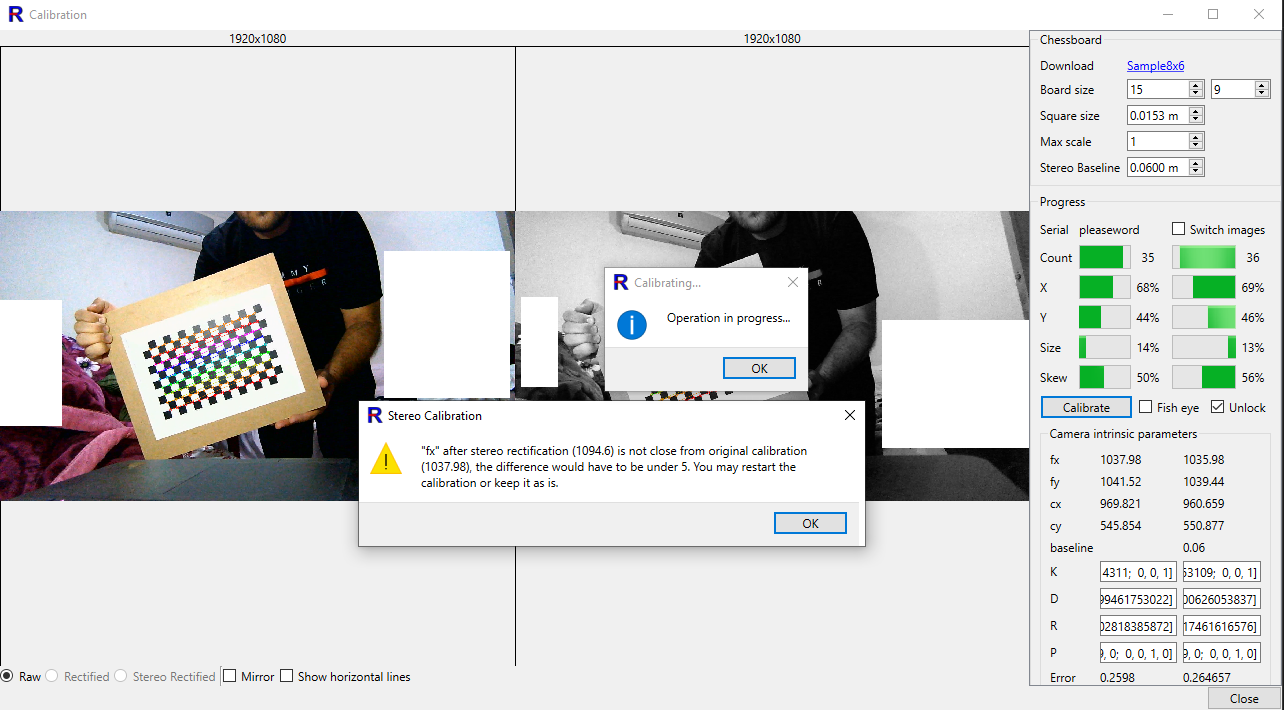
i will re calibrate and try again , kindly check the next Page
URL: http://official-rtab-map-forum.206.s1.nabble.com/stereo-example-tp10512p10580.html
i made the calibration
( NOTE : before with my matlab calibration it does not make the same results left like right and they are already close in results in mat lab )
NOTE the suqare size is 15 mm which means 0.015 m but for some reason it made it 0.0153 m
the code prints the following
Using single stereo camera (device=0)
Camera initialized successfully
Stereo model:
Baseline: 0.060000
Left fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488
Right fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488
Image size: 1920x1080
Press ESC to quit, 'r' to start/stop recording.
[FATAL] (2024-10-18 19:25:04) OptimizerG2O.cpp:1906::rtabmap::OptimizerG2O::optimizeBA() Condition (optimizer.verifyInformationMatrices()) not met!
it open the cameras but then crash i dont know why
the new calibration by RTAB-map
%YAML:1.0
---
camera_name: "00000001_right"
image_width: 1920
image_height: 1080
camera_matrix:
rows: 3
cols: 3
data: [ 1.0359770426766943e+03, 0., 9.6065890354473777e+02, 0.,
1.0394423273915493e+03, 5.5087654755310905e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 2.4355626441227931e-02, -3.3584440811797761e-02,
3.6038494845013081e-03, 1.1131878223688239e-04,
6.5387006260538370e-03 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9895843991392885e-01, 8.3642089290527615e-03,
-4.4856162717296755e-02, -8.2896391727531969e-03,
9.9996393240717651e-01, 1.8481794180737676e-03,
4.4870003422275380e-02, -1.4744130245592985e-03,
9.9899174616165765e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03,
-6.5676209817282739e+01, 0., 1.0946034969547125e+03,
5.5364748764038086e+02, 0., 0., 0., 1., 0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
%YAML:1.0
---
camera_name: "00000001_left"
image_width: 1920
image_height: 1080
camera_matrix:
rows: 3
cols: 3
data: [ 1.0379835606151807e+03, 0., 9.6982079338221376e+02, 0.,
1.0415162275006037e+03, 5.4585387782143107e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 2.8774425005461009e-02, -5.1330312743177994e-02,
2.5710449115585476e-03, 1.4016719035248263e-03,
2.2524994617530224e-02 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9959277633679888e-01, 6.1221381808933394e-03,
-2.7871148512115407e-02, -6.1684487373559948e-03,
9.9997973315311695e-01, -1.5759197935309851e-03,
2.7860935653078053e-02, 1.7471997925479824e-03,
9.9961028183858724e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03, 0., 0.,
1.0946034969547125e+03, 5.5364748764038086e+02, 0., 0., 0., 1.,
0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
%YAML:1.0
---
camera_name: "00000001"
rotation_matrix:
rows: 3
cols: 3
data: [ 9.9985289489103091e-01, -2.0953127011127987e-03,
1.7023461537229983e-02, 2.1514980425922209e-03,
9.9999229703997661e-01, -3.2828214821735832e-03,
-1.7016451868639215e-02, 3.3189645065372286e-03,
9.9984970112532745e-01 ]
translation_matrix:
rows: 3
cols: 1
data: [ -5.9937506394835721e-02, -5.0185253574318279e-04,
2.6913697630378953e-03 ]
essential_matrix:
rows: 3
cols: 3
data: [ 2.6980496974639483e-06, -2.6428397889900752e-03,
-4.8375758123200374e-04, 1.6399160033566383e-03,
1.8968989229530586e-04, 5.8856903502701279e-02,
3.6587703005706233e-04, -5.8821360250764100e-02,
2.0148221832101199e-04 ]
fundamental_matrix:
rows: 3
cols: 3
data: [ -5.2967938474355944e-09, 5.1708078139017699e-06,
-1.8315854186840529e-03, -3.2087395187436668e-06,
-3.6989757433487991e-07, -1.1622274507719302e-01,
1.0285784656178713e-03, 1.1446287425398083e-01,
9.9999999999999989e-01 ]
screen shot of the calibration , i dont know about the warning
i will re calibrate and try again , kindly check the next Page
| Free forum by Nabble | Edit this page |