RTAB vs other scanning apps for iOS
Posted by Pierre on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-vs-other-scanning-apps-for-iOS-tp10615.html
Hi everyone,
This question builds on the thread here, but I thought it would be helpful to start a new one for clarity.
My goal is not to make an impractically broad feature request but rather to understand the challenges and explore if there are ways to handle them myself.
To summarize the linked discussion: for scanning extensive galleries or corridors, ideally, we’d like to capture the ceiling, floor, and walls accurately with a single, smooth pass. To maximize coverage, I’ve been using the “low confidence” setting in the app, which reduces data discard but introduces substantial noise because of depth interpolation. This is especially problematic in low-texture areas. An example of this noise can be seen below:
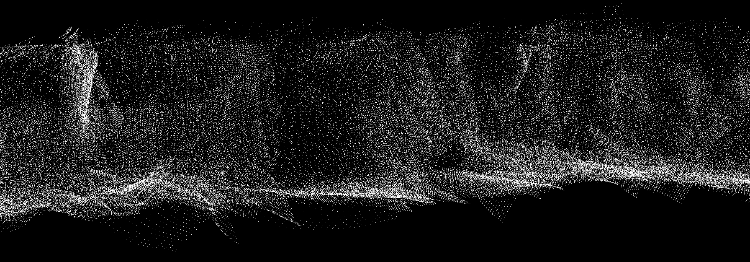
Although this screenshot doesn’t fully show the extent, the noise is problematic in practice, and after extensive attempts to create a usable mesh from these clouds, I had to set the project aside.
Using “medium confidence” reduces noise slightly, but it seems the only consistently viable option is “high confidence,” as suggested by Mathieu in the original thread. However, this setting significantly extends scan time, as each pass needs to be carefully deliberate.
In contrast, it seems that other apps have found effective ways to mitigate this. For instance, here’s a quick scan I captured using Scaniverse while walking briskly through a low-texture gallery:
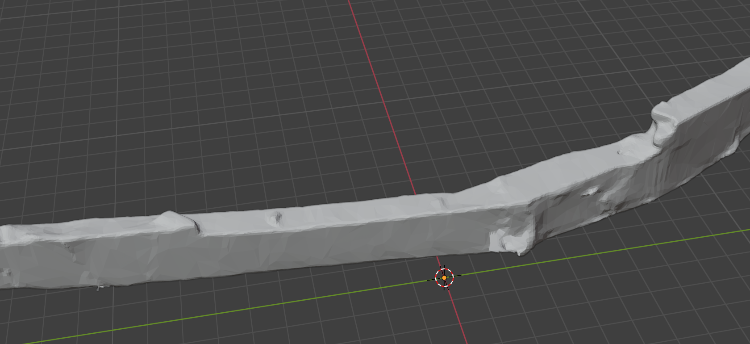
Given the high quality achieved at such a speed, I’m curious about how Scaniverse handles this (it’s unfortunately closed-source) and whether any insights from it might make RTAB-Map more adaptable to similar scanning workflows. I would guess that there is that is some clever playing around with the confidence maps, though I’m not sure of the specifics.
Here are a few questions I hope might clarify a path forward:
- Are there any known algorithms or public methods relevant to handling this type of noise, or is it likely a custom solution developed by the Scaniverse team?
- Is there a way to achieve comparable results with RTAB-Map currently? Specifically, can it produce reliable scans while moving quickly through large, low-texture corridors?
- If not, are there strategies I could try using RTAB-Map’s data output to improve results? By that I mean, starting from the depth images and poses (and RGB on the side) and then using external hand-made code.
Any suggestions on where to start would be greatly appreciated. Although I fear that it will be hard to do anything consistant and reliable without the data of the confidence maps.
Thank you in advance for any insights or suggestions!
Best,
Pierre
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-vs-other-scanning-apps-for-iOS-tp10615.html
Hi everyone,
This question builds on the thread here, but I thought it would be helpful to start a new one for clarity.
My goal is not to make an impractically broad feature request but rather to understand the challenges and explore if there are ways to handle them myself.
To summarize the linked discussion: for scanning extensive galleries or corridors, ideally, we’d like to capture the ceiling, floor, and walls accurately with a single, smooth pass. To maximize coverage, I’ve been using the “low confidence” setting in the app, which reduces data discard but introduces substantial noise because of depth interpolation. This is especially problematic in low-texture areas. An example of this noise can be seen below:
Although this screenshot doesn’t fully show the extent, the noise is problematic in practice, and after extensive attempts to create a usable mesh from these clouds, I had to set the project aside.
Using “medium confidence” reduces noise slightly, but it seems the only consistently viable option is “high confidence,” as suggested by Mathieu in the original thread. However, this setting significantly extends scan time, as each pass needs to be carefully deliberate.
In contrast, it seems that other apps have found effective ways to mitigate this. For instance, here’s a quick scan I captured using Scaniverse while walking briskly through a low-texture gallery:
Given the high quality achieved at such a speed, I’m curious about how Scaniverse handles this (it’s unfortunately closed-source) and whether any insights from it might make RTAB-Map more adaptable to similar scanning workflows. I would guess that there is that is some clever playing around with the confidence maps, though I’m not sure of the specifics.
Here are a few questions I hope might clarify a path forward:
- Are there any known algorithms or public methods relevant to handling this type of noise, or is it likely a custom solution developed by the Scaniverse team?
- Is there a way to achieve comparable results with RTAB-Map currently? Specifically, can it produce reliable scans while moving quickly through large, low-texture corridors?
- If not, are there strategies I could try using RTAB-Map’s data output to improve results? By that I mean, starting from the depth images and poses (and RGB on the side) and then using external hand-made code.
Any suggestions on where to start would be greatly appreciated. Although I fear that it will be hard to do anything consistant and reliable without the data of the confidence maps.
Thank you in advance for any insights or suggestions!
Best,
Pierre
| Free forum by Nabble | Edit this page |