Some issue with rtabmap_drone_example
Posted by Samim-17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628.html
Hello
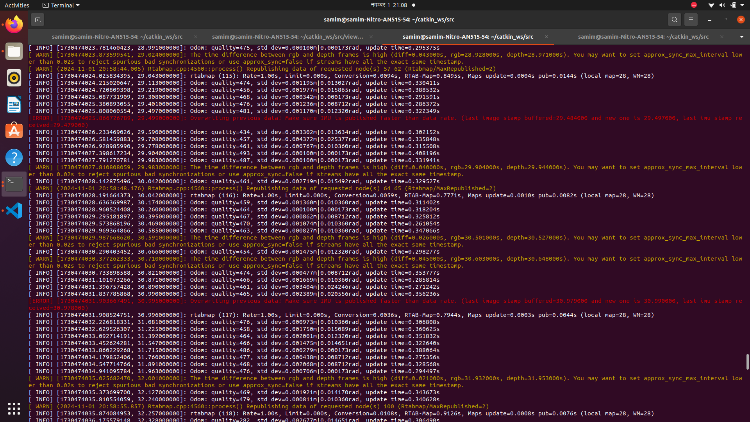
First of all I am able to launch gazebo.launch and simulate drone with d435 camera in it. Then I skipped the slam.launch and launch the main rtabmap.launch with the parameters as that of slam.launch. In this rtabmap.launch terminal i get the following errors.
Also the offboard.py is launching but drone is showing erratic behaviour and not being stable like that shown in video.
Below is my tf tree
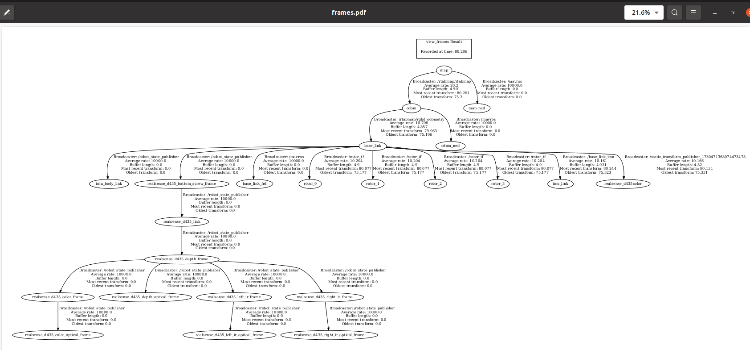 alt="tf tree"/>
alt="tf tree"/>
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628.html
Hello
First of all I am able to launch gazebo.launch and simulate drone with d435 camera in it. Then I skipped the slam.launch and launch the main rtabmap.launch with the parameters as that of slam.launch. In this rtabmap.launch terminal i get the following errors.
\log <raw> [ WARN] [1730474035.025682470, 32.001000000]: The time difference between rgb and depth frames is high (diff=0.021000s, rgb=31.932000s, depth=31.953000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474035.373699700, 32.127000000]: Odom: quality=469, std dev=0.001921m|0.014170rad, update time=0.343673s [ INFO] [1730474035.810554059, 32.240000000]: Odom: quality=479, std dev=0.000811m|0.010360rad, update time=0.340628s [ WARN] (2024-11-01 20:58:55.857) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474035.874084953, 32.257000000]: rtabmap (118): Rate=1.00s, Limit=0.000s, Conversion=0.0108s, RTAB-Map=0.9126s, Maps update=0.0008s pub=0.0076s (local map=28, WM=28) [ INFO] [1730474036.175579148, 32.328000000]: Odom: quality=282, std dev=0.002677m|0.014651rad, update time=0.306490s [ INFO] [1730474036.533996089, 32.448000000]: Odom: quality=468, std dev=0.005566m|0.018649rad, update time=0.315518s [ INFO] [1730474036.886224504, 32.583000000]: Odom: quality=433, std dev=0.002278m|0.014170rad, update time=0.316648s [ INFO] [1730474037.167899964, 32.636000000]: Odom: quality=454, std dev=0.002044m|0.020216rad, update time=0.275416s [ INFO] [1730474037.499980217, 32.731000000]: Odom: quality=464, std dev=0.001995m|0.014170rad, update time=0.293052s [ INFO] [1730474037.890732564, 32.852000000]: Odom: quality=450, std dev=0.003236m|0.022178rad, update time=0.333286s [ INFO] [1730474038.264234681, 32.980000000]: Odom: quality=470, std dev=0.001674m|0.014170rad, update time=0.306275s [ INFO] [1730474038.535348564, 33.045000000]: Odom: quality=473, std dev=0.000686m|0.008712rad, update time=0.264479s [ WARN] [1730474038.564784188, 33.045000000]: The time difference between rgb and depth frames is high (diff=0.030000s, rgb=33.045000s, depth=33.015000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474038.911236289, 33.140000000]: Odom: quality=467, std dev=0.000100m|0.000173rad, update time=0.290483s [ WARN] (2024-11-01 20:58:59.413) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474039.432053259, 33.248000000]: rtabmap (119): Rate=1.00s, Limit=0.000s, Conversion=0.0038s, RTAB-Map=0.8826s, Maps update=0.0005s pub=0.0083s (local map=28, WM=28) [ INFO] [1730474039.537778785, 33.292000000]: Odom: quality=472, std dev=0.001328m|0.008712rad, update time=0.367788s [ INFO] [1730474039.873544224, 33.365000000]: Odom: quality=466, std dev=0.002507m|0.017423rad, update time=0.303658s [ INFO] [1730474040.211585777, 33.433000000]: Odom: quality=479, std dev=0.001050m|0.010360rad, update time=0.333583s [ERROR] [1730474040.323820106, 33.441000000]: Overwriting previous data! Make sure IMU is published faster than data rate. (last image stamp buffered=33.421000 and new one is 33.433000, last imu stamp received=33.417000) [ INFO] [1730474040.652137380, 33.539000000]: Odom: quality=485, std dev=0.002137m|0.017944rad, update time=0.326630s [ INFO] [1730474040.990352515, 33.634000000]: Odom: quality=465, std dev=0.001865m|0.012320rad, update time=0.333419s [ INFO] [1730474041.417833396, 33.690000000]: Odom: quality=479, std dev=0.000340m|0.000173rad, update time=0.315418s [ INFO] [1730474041.845687837, 33.854000000]: Odom: quality=485, std dev=0.001001m|0.011465rad, update time=0.351057s [ INFO] [1730474042.169317281, 33.922000000]: Odom: quality=463, std dev=0.002367m|0.016542rad, update time=0.312492s [ INFO] [1730474042.565623664, 34.034000000]: Odom: quality=461, std dev=0.002610m|0.011465rad, update time=0.291035s [ INFO] [1730474042.957254603, 34.128000000]: Odom: quality=475, std dev=0.000224m|0.000173rad, update time=0.294510s [ INFO] [1730474043.291507811, 34.214000000]: Odom: quality=455, std dev=0.003620m|0.019282rad, update time=0.328831s [ INFO] [1730474043.672182232, 34.282000000]: Odom: quality=462, std dev=0.002072m|0.013027rad, update time=0.346935s [ WARN] (2024-11-01 20:59:03.898) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474043.914928194, 34.315000000]: rtabmap (120): Rate=1.00s, Limit=0.000s, Conversion=0.0042s, RTAB-Map=0.9413s, Maps update=0.0006s pub=0.0064s (local map=28, WM=28) [ INFO] [1730474044.041620968, 34.343000000]: Odom: quality=461, std dev=0.001431m|0.014170rad, update time=0.330247s [ERROR] [1730474044.119476417, 34.354000000]: Overwriting previous data! Make sure IMU is published faster than data rate. (last image stamp buffered=34.341000 and new one is 34.351000, last imu stamp received=34.337000) [ INFO] [1730474044.427055248, 34.478000000]: Odom: quality=448, std dev=0.001375m|0.013634rad, update time=0.301264s [ INFO] [1730474044.645264238, 34.581000000]: Odom: quality=459, std dev=0.002016m|0.018188rad, update time=0.213122s [ INFO] [1730474045.055955174, 34.681000000]: Odom: quality=475, std dev=0.000868m|0.010360rad, update time=0.293255s [ INFO] [1730474045.349433044, 34.784000000]: Odom: quality=452, std dev=0.002955m|0.021909rad, update time=0.249081s [ INFO] [1730474045.674602067, 34.973000000]: Odom: quality=467, std dev=0.002215m|0.018188rad, update time=0.235898s [ INFO] [1730474046.013637541, 35.091000000]: Odom: quality=471, std dev=0.000809m|0.008712rad, update time=0.323346s [ INFO] [1730474046.315523570, 35.204000000]: Odom: quality=467, std dev=0.001856m|0.015492rad, update time=0.292124s [ INFO] [1730474046.722004349, 35.334000000]: Odom: quality=463, std dev=0.001281m|0.013027rad, update time=0.365252s [ INFO] [1730474047.100154837, 35.452000000]: Odom: quality=466, std dev=0.003599m|0.010360rad, update time=0.344805s [ WARN] (2024-11-01 20:59:07.172) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ERROR] [1730474047.183280290, 35.456000000]: Overwriting previous data! Make sure IMU is published faster than data rate. (last image stamp buffered=35.446000 and new one is 35.452000, last imu stamp received=35.438000) [ INFO] [1730474047.185264656, 35.452000000]: rtabmap (121): Rate=1.00s, Limit=0.000s, Conversion=0.0049s, RTAB-Map=0.8566s, Maps update=0.0012s pub=0.0062s (local map=28, WM=28) [ INFO] [1730474047.538738360, 35.601000000]: Odom: quality=481, std dev=0.001736m|0.012320rad, update time=0.344836s [ INFO] [1730474047.898306857, 35.711000000]: Odom: quality=469, std dev=0.000925m|0.008712rad, update time=0.305793s [ WARN] [1730474047.929424928, 35.720000000]: The time difference between rgb and depth frames is high (diff=0.041000s, rgb=35.640000s, depth=35.681000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474048.245852220, 35.790000000]: Odom: quality=496, std dev=0.000522m|0.008712rad, update time=0.309222s [ INFO] [1730474048.560901314, 35.858000000]: Odom: quality=450, std dev=0.001213m|0.010360rad, update time=0.294724s [ INFO] [1730474048.877628035, 35.954000000]: Odom: quality=469, std dev=0.001257m|0.014170rad, update time=0.308437s [ INFO] [1730474049.244380746, 36.086000000]: Odom: quality=481, std dev=0.000209m|0.000173rad, update time=0.328316s [ INFO] [1730474049.786235384, 36.212000000]: Odom: quality=453, std dev=0.003601m|0.016851rad, update time=0.317982s [ WARN] [1730474049.789500932, 36.212000000]: The time difference between rgb and depth frames is high (diff=0.057000s, rgb=36.145000s, depth=36.088000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474050.094298015, 36.256000000]: Odom: quality=472, std dev=0.000587m|0.008712rad, update time=0.301864s [ INFO] [1730474050.407149739, 36.325000000]: Odom: quality=470, std dev=0.002162m|0.015492rad, update time=0.306734s [ WARN] (2024-11-01 20:59:10.633) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474050.643939176, 36.382000000]: rtabmap (122): Rate=1.00s, Limit=0.000s, Conversion=0.0222s, RTAB-Map=0.8295s, Maps update=0.0005s pub=0.0039s (local map=28, WM=28) [ INFO] [1730474050.742559870, 36.411000000]: Odom: quality=470, std dev=0.001622m|0.015089rad, update time=0.290925s [ INFO] [1730474051.050653244, 36.488000000]: Odom: quality=448, std dev=0.002471m|0.013027rad, update time=0.272568s [ INFO] [1730474051.377648996, 36.568000000]: Odom: quality=472, std dev=0.002024m|0.012320rad, update time=0.296573s [ INFO] [1730474051.707940588, 36.688000000]: Odom: quality=473, std dev=0.002327m|0.021339rad, update time=0.298214s [ INFO] [1730474052.031618024, 36.801000000]: Odom: quality=464, std dev=0.001822m|0.016851rad, update time=0.315574s [ WARN] [1730474052.127903324, 36.852000000]: The time difference between rgb and depth frames is high (diff=0.047000s, rgb=36.744000s, depth=36.791000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474052.466569051, 36.962000000]: Odom: quality=472, std dev=0.001894m|0.018649rad, update time=0.335166s [ INFO] [1730474052.754453497, 36.999000000]: Odom: quality=469, std dev=0.000100m|0.000173rad, update time=0.232854s [ INFO] [1730474053.053584945, 37.097000000]: Odom: quality=481, std dev=0.000476m|0.000173rad, update time=0.274985s [ INFO] [1730474053.483150097, 37.226000000]: Odom: quality=454, std dev=0.002355m|0.014651rad, update time=0.364859s [ INFO] [1730474053.943869714, 37.350000000]: Odom: quality=455, std dev=0.001897m|0.017423rad, update time=0.393520s [ WARN] [1730474053.964328027, 37.352000000]: The time difference between rgb and depth frames is high (diff=0.026000s, rgb=37.281000s, depth=37.307000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474054.313140304, 37.418000000]: Odom: quality=478, std dev=0.003051m|0.018649rad, update time=0.342956s [ WARN] (2024-11-01 20:59:14.366) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474054.372209172, 37.436000000]: rtabmap (123): Rate=1.00s, Limit=0.000s, Conversion=0.0066s, RTAB-Map=0.8787s, Maps update=0.0002s pub=0.0026s (local map=28, WM=28) [ INFO] [1730474054.746666215, 37.518000000]: Odom: quality=465, std dev=0.002286m|0.011465rad, update time=0.289382s [ WARN] [1730474054.749732620, 37.518000000]: The time difference between rgb and depth frames is high (diff=0.025000s, rgb=37.488000s, depth=37.513000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474055.142107528, 37.672000000]: Odom: quality=474, std dev=0.003595m|0.020556rad, update time=0.382467s [ INFO] [1730474055.552705064, 37.809000000]: Odom: quality=469, std dev=0.000978m|0.008712rad, update time=0.267653s [ INFO] [1730474055.954117193, 37.934000000]: Odom: quality=476, std dev=0.001988m|0.017144rad, update time=0.356928s [ERROR] [1730474056.085340010, 37.952000000]: Overwriting previous data! Make sure IMU is published faster than data rate. (last image stamp buffered=37.935000 and new one is 37.952000, last imu stamp received=37.934000) [ INFO] [1730474056.361687017, 38.003000000]: Odom: quality=457, std dev=0.001966m|0.017423rad, update time=0.262339s [ INFO] [1730474056.700057892, 38.104000000]: Odom: quality=460, std dev=0.001075m|0.010360rad, update time=0.304347s [ INFO] [1730474057.009462191, 38.189000000]: Odom: quality=465, std dev=0.000100m|0.000173rad, update time=0.264911s [ INFO] [1730474057.319316197, 38.261000000]: Odom: quality=464, std dev=0.000100m|0.000173rad, update time=0.305535s [ INFO] [1730474057.840026058, 38.429000000]: Odom: quality=476, std dev=0.000100m|0.000173rad, update time=0.392900s [ INFO] [1730474058.230278522, 38.507000000]: Odom: quality=448, std dev=0.002175m|0.012320rad, update time=0.357093s [ WARN] (2024-11-01 20:59:18.233) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474058.242611419, 38.507000000]: rtabmap (124): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.9153s, Maps update=0.0004s pub=0.0031s (local map=28, WM=28) [ INFO] [1730474058.509867013, 38.579000000]: Odom: quality=455, std dev=0.001066m|0.010360rad, update time=0.271154s [ INFO] [1730474058.839498725, 38.651000000]: Odom: quality=479, std dev=0.000151m|0.000173rad, update time=0.294592s [ INFO] [1730474059.159575397, 38.725000000]: Odom: quality=485, std dev=0.001063m|0.011465rad, update time=0.277482s [ INFO] [1730474059.433159803, 38.768000000]: Odom: quality=473, std dev=0.000352m|0.008712rad, update time=0.268199s [ INFO] [1730474059.737436265, 38.845000000]: Odom: quality=472, std dev=0.001040m|0.008712rad, update time=0.265257s [ INFO] [1730474060.062856163, 38.972000000]: Odom: quality=459, std dev=0.002017m|0.010360rad, update time=0.320130s [ INFO] [1730474060.456225795, 39.128000000]: Odom: quality=462, std dev=0.001311m|0.012320rad, update time=0.368282s [ INFO] [1730474060.851943148, 39.247000000]: Odom: quality=477, std dev=0.002826m|0.019282rad, update time=0.354452s [ INFO] [1730474061.140251530, 39.299000000]: Odom: quality=460, std dev=0.002137m|0.008712rad, update time=0.252393s [ INFO] [1730474061.505648688, 39.393000000]: Odom: quality=467, std dev=0.001301m|0.013027rad, update time=0.331686s [ WARN] [1730474061.546671779, 39.403000000]: The time difference between rgb and depth frames is high (diff=0.039000s, rgb=39.320000s, depth=39.359000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474061.906094729, 39.509000000]: Odom: quality=485, std dev=0.000100m|0.000173rad, update time=0.348104s [ WARN] (2024-11-01 20:59:22.016) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474062.036170530, 39.539000000]: rtabmap (125): Rate=1.00s, Limit=0.000s, Conversion=0.0032s, RTAB-Map=0.8786s, Maps update=0.0009s pub=0.0120s (local map=28, WM=28) [ INFO] [1730474062.285240137, 39.624000000]: Odom: quality=472, std dev=0.000946m|0.011465rad, update time=0.360508s [ INFO] [1730474062.759108984, 39.794000000]: Odom: quality=453, std dev=0.001448m|0.008712rad, update time=0.365886s [ INFO] [1730474063.060479720, 39.882000000]: Odom: quality=478, std dev=0.000806m|0.008712rad, update time=0.271443s [ INFO] [1730474063.333536736, 39.938000000]: Odom: quality=479, std dev=0.000961m|0.008712rad, update time=0.265548s [ INFO] [1730474063.711716499, 40.101000000]: Odom: quality=459, std dev=0.002789m|0.014651rad, update time=0.326047s [ INFO] [1730474064.072728933, 40.229000000]: Odom: quality=421, std dev=0.005498m|0.025108rad, update time=0.316846s [ INFO] [1730474064.399034850, 40.352000000]: Odom: quality=450, std dev=0.002935m|0.010360rad, update time=0.300593s [ INFO] [1730474064.689249020, 40.455000000]: Odom: quality=462, std dev=0.000731m|0.000173rad, update time=0.280914s [ INFO] [1730474065.110207050, 40.503000000]: Odom: quality=458, std dev=0.002221m|0.013634rad, update time=0.282454s [ WARN] (2024-11-01 20:59:25.401) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474065.421146971, 40.555000000]: rtabmap (126): Rate=1.00s, Limit=0.000s, Conversion=0.0041s, RTAB-Map=0.7131s, Maps update=0.0005s pub=0.0133s (local map=28, WM=28) [ INFO] [1730474065.631455578, 40.612000000]: Odom: quality=475, std dev=0.001389m|0.008712rad, update time=0.316132s [ INFO] [1730474065.922748156, 40.665000000]: Odom: quality=450, std dev=0.000520m|0.000173rad, update time=0.281348s [ INFO] [1730474066.254324445, 40.775000000]: Odom: quality=440, std dev=0.001664m|0.013027rad, update time=0.326330s [ WARN] [1730474066.300799413, 40.791000000]: The time difference between rgb and depth frames is high (diff=0.060000s, rgb=40.668000s, depth=40.728000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474066.583056874, 40.833000000]: Odom: quality=452, std dev=0.000100m|0.000173rad, update time=0.279225s [ INFO] [1730474067.161820666, 41.040000000]: Odom: quality=474, std dev=0.001399m|0.010360rad, update time=0.344502s [ INFO] [1730474067.499786849, 41.104000000]: Odom: quality=468, std dev=0.003320m|0.019672rad, update time=0.330948s [ INFO] [1730474067.766423596, 41.147000000]: Odom: quality=470, std dev=0.000100m|0.000173rad, update time=0.236801s [ INFO] [1730474068.108896569, 41.238000000]: Odom: quality=480, std dev=0.001154m|0.012320rad, update time=0.309952s [ INFO] [1730474068.547931028, 41.425000000]: Odom: quality=459, std dev=0.001767m|0.010360rad, update time=0.330447s [ WARN] [1730474068.551394304, 41.425000000]: The time difference between rgb and depth frames is high (diff=0.054000s, rgb=41.341000s, depth=41.395000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474068.839424921, 41.496000000]: Odom: quality=473, std dev=0.001433m|0.010360rad, update time=0.284819s [ INFO] [1730474069.153988677, 41.559000000]: Odom: quality=479, std dev=0.000869m|0.000173rad, update time=0.270633s [ INFO] [1730474069.488084593, 41.643000000]: Odom: quality=455, std dev=0.003384m|0.018867rad, update time=0.326200s [ INFO] [1730474069.835895466, 41.739000000]: Odom: quality=455, std dev=0.000260m|0.000173rad, update time=0.319384s [ WARN] (2024-11-01 20:59:30.029) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2) [ INFO] [1730474070.041039297, 41.773000000]: rtabmap (127): Rate=1.00s, Limit=0.000s, Conversion=0.0072s, RTAB-Map=0.8728s, Maps update=0.0012s pub=0.0041s (local map=28, WM=28) [ INFO] [1730474070.197543501, 41.830000000]: Odom: quality=460, std dev=0.001953m|0.012320rad, update time=0.306853s [ WARN] [1730474070.288379329, 41.882000000]: The time difference between rgb and depth frames is high (diff=0.046000s, rgb=41.773000s, depth=41.819000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730474070.589088307, 41.980000000]: Odom: quality=455, std dev=0.003790m|0.018649rad, update time=0.291873s [ INFO] [1730474070.992268571, 42.079000000]: Odom: quality=456, std dev=0.001153m|0.008712rad, update time=0.355209s [ INFO] [1730474071.337321671, 42.165000000]: Odom: quality=456, std dev=0.002758m|0.013634rad, update time=0.256602s [ INFO] [1730474071.723541695, 42.328000000]: Odom: quality=443, std dev=0.001190m|0.008712rad, update time=0.351182s [ INFO] [1730474072.069876927, 42.453000000]: Odom: quality=429, std dev=0.002018m|0.016542rad, update time=0.302176s [ INFO] [1730474072.437277464, 42.621000000]: Odom: quality=457, std dev=0.001353m|0.010360rad, update time=0.358383s [ INFO] [1730474072.804422940, 42.718000000]: Odom: quality=443, std dev=0.004278m|0.013634rad, update time=0.299339s [ WARN] (2024-11-01 20:59:33.058) OdometryF2M.cpp:569::computeTransform() Registration failed: "Not enough inliers 6/20 (matches=127) between -1 and 297" (guess=xyz=-0.000009,-0.000074,0.000958 rpy=0.008681,0.006731,-0.069072) [ WARN] (2024-11-01 20:59:33.058) OdometryF2M.cpp:317::computeTransform() Failed to find a transformation with the provided guess (xyz=-0.000009,-0.000074,0.000958 rpy=0.008681,0.006731,-0.069072), trying again without a guess. [ WARN] (2024-11-01 20:59:33.186) Rtabmap.cpp:4560::process() Republishing data of requested node(s) 100 (Rtabmap/MaxRepublished=2)
Also the offboard.py is launching but drone is showing erratic behaviour and not being stable like that shown in video.
Below is my tf tree
alt="tf tree"/>
| Free forum by Nabble | Edit this page |