Re: Some issue with rtabmap_drone_example
Posted by Samim-17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628p10632.html
first I tried rtabmap.launch. But after this I tried slam.launch and found the following
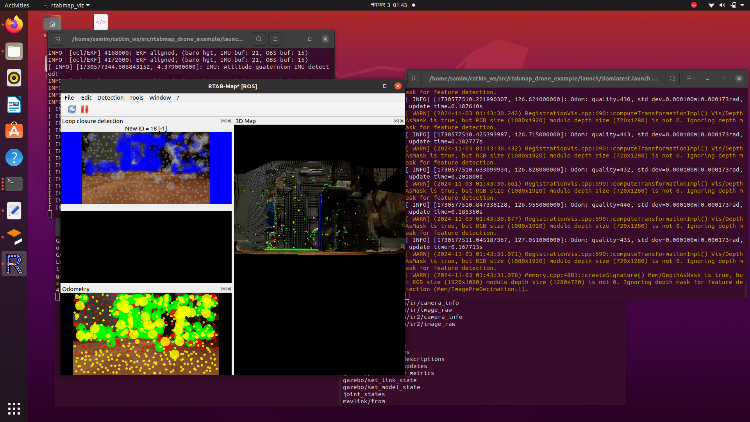
In the terminal I am still getting this error
Is there any problem in this last steps of adding new camera ? Also my tf tree doesnot have base_link_stabilized. Will it be of issue ? Generally the r200 simulation runs good on my pc too
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628p10632.html
first I tried rtabmap.launch. But after this I tried slam.launch and found the following
In the terminal I am still getting this error
[ INFO] [1730577498.409939033, 120.660000000]: Odom: quality=412, std dev=0.000271m|0.000173rad, update time=0.180671s [ WARN] (2024-11-03 01:43:18.437) RegistrationVis.cpp:690::computeTransformationImpl() Vis/DepthAsMask is true, but RGB size (1080x1920) modulo depth size (720x1280) is not 0. Ignoring depth mask for feature detection. [ INFO] [1730577498.631603191, 120.774000000]: Odom: quality=412, std dev=0.000100m|0.000173rad, update time=0.194843s [ WARN] (2024-11-03 01:43:18.641) Memory.cpp:4881::createSignature() Mem/DepthAsMask is true, but RGB size (1920x1080) modulo depth size (1280x720) is not 0. Ignoring depth mask for feature detection (Mem/ImagePreDecimation=1). [ WARN] (2024-11-03 01:43:18.658) RegistrationVis.cpp:690::computeTransformationImpl() Vis/DepthAsMask is true, but RGB size (1080x1920) modulo depth size (720x1280) is not 0. Ignoring depth mask for feature detection. [ INFO] [1730577498.792125604, 120.789000000]: Odom: quality=434, std dev=0.000684m|0.000173rad, update time=0.133699s [ WARN] (2024-11-03 01:43:18.796) RegistrationVis.cpp:690::computeTransformationImpl() Vis/DepthAsMask is true, but RGB size (1080x1920) modulo depth size (720x1280) is not 0. Ignoring depth mask for feature detection.I changed the r200 camera to d435 for my purposes. And the extra thing I did was transformed frames
rosrun tf static_transform_publisher 0 0 0 0 0 0 D435_camera_color_optical_frame D435_cameracolor 100When I tried to run offboard the drone does not hold, altitude goes on increasing and crashes.
Is there any problem in this last steps of adding new camera ? Also my tf tree doesnot have base_link_stabilized. Will it be of issue ? Generally the r200 simulation runs good on my pc too
| Free forum by Nabble | Edit this page |