Re: Some issue with rtabmap_drone_example
Posted by Samim-17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628p10639.html
I matched the resolution in camera urdf and the slam.launch terminal showed little to no warning/error with the following
But I would like to try this on real drone with the d435 camera. In real d435 also the color and depth resolution doesnot match. Will the same launch file ( slam.launch) work when the camera node is running and mavros is sending data ? How should my TF tree be If I want to implement in real drone.
This is for my project, where first I want to 2D and then move to 3D.
I did a roswtf and found the following
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-issue-with-rtabmap-drone-example-tp10628p10639.html
I matched the resolution in camera urdf and the slam.launch terminal showed little to no warning/error with the following
[ WARN] [1730606122.325910410, 31.511000000]: The time difference between rgb and depth frames is high (diff=0.022000s, rgb=31.425000s, depth=31.447000s). You may want to set approx_sync_max_interval lower than 0.02s to reject spurious bad synchronizations or use approx_sync=false if streams have all the exact same timestamp. [ INFO] [1730606122.567529430, 31.578000000]: Odom: quality=462, std dev=0.000100m|0.000173rad, update time=0.234296sThe offboard mode seems to work fine at first but after some 2d nav goal I get the following error in the gazebo.launch terminal
TF_REPEATED_DATA ignoring data with redundant timestamp for frame base_link (parent base_link_stabilized) at time 73.233000 according to authority unknown_publisherand in the offboard I get
Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame base_link (parent base_link_stabilized) at time 50.283000 according to authority unknown_publisher
But I would like to try this on real drone with the d435 camera. In real d435 also the color and depth resolution doesnot match. Will the same launch file ( slam.launch) work when the camera node is running and mavros is sending data ? How should my TF tree be If I want to implement in real drone.
This is for my project, where first I want to 2D and then move to 3D.
I did a roswtf and found the following
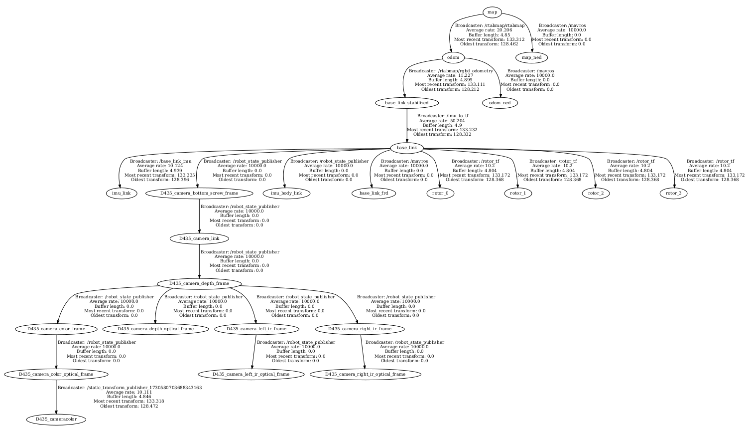
WARNING These nodes have died: * spawn_model-5 Found 1 error(s). ERROR The following nodes should be connected but aren't: * /move_base->/move_base (/move_base/global_costmap/footprint) * /move_base->/move_base (/move_base/local_costmap/footprint)my tf tree is as follow
| Free forum by Nabble | Edit this page |