Re: Using external odometry with rtabmap slam and aligning to gravity
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-external-odometry-with-rtabmap-slam-and-aligning-to-gravity-tp10648p10655.html
If rtabmap_slam is correctly receiving your imu topic (which should contain estimated orientation, if not, you can use Madgwick imu filter ros node to estimate it), it should add the gravity constraints to the graph and re-optimize at each new update.
Another way to debug, if you open the database in rtabmap-databaseViewer, you should see if the nodes have gravity constraints:
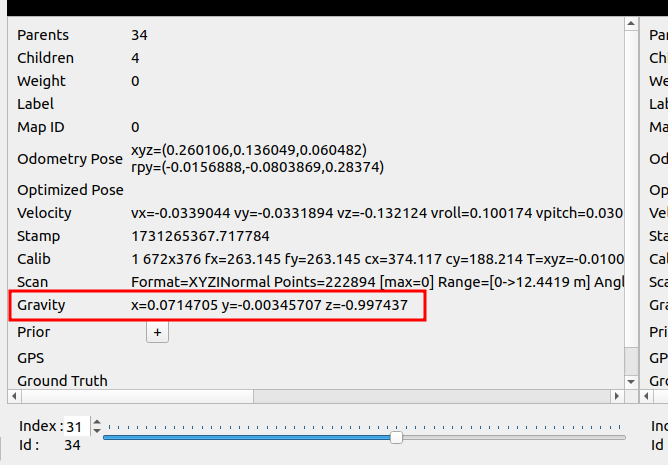
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-external-odometry-with-rtabmap-slam-and-aligning-to-gravity-tp10648p10655.html
If rtabmap_slam is correctly receiving your imu topic (which should contain estimated orientation, if not, you can use Madgwick imu filter ros node to estimate it), it should add the gravity constraints to the graph and re-optimize at each new update.
Another way to debug, if you open the database in rtabmap-databaseViewer, you should see if the nodes have gravity constraints:
| Free forum by Nabble | Edit this page |