Re: Using external odometry with rtabmap slam and aligning to gravity
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-external-odometry-with-rtabmap-slam-and-aligning-to-gravity-tp10648p10687.html
The problem is that the lidar point cloud seems not in the base frame, but may be using odom frame computed externally as the base frame. What is the frame_id in the point cloud topic? In rviz, if you set the global frame to base_link, the lidar point cloud should not rotate when you rotate the lidar. It should rotate only if you set your odom frame in rviz config.
Here I show the point clouds in the supposed base frame. On one frame the Up vector of the point cloud is y+, and in the other one it is combination of y+ and z+.
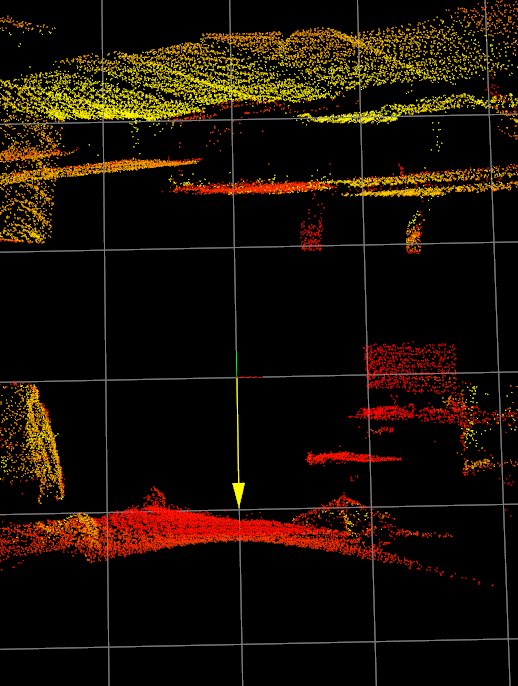
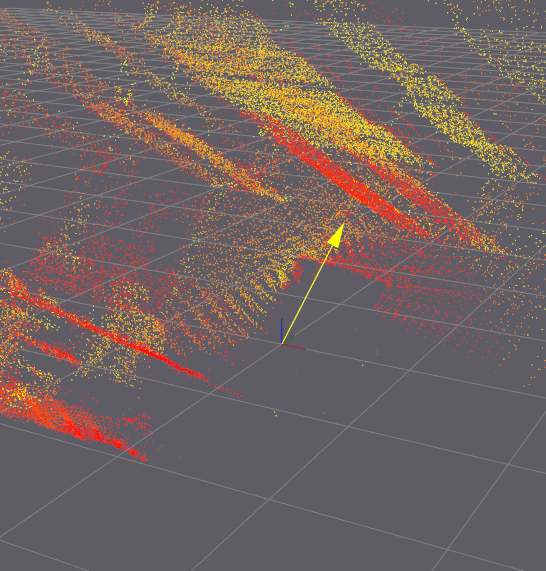
Note also in the first frame the gravity vector is pointing to the ground of the point cloud, and the others the ceiling.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-external-odometry-with-rtabmap-slam-and-aligning-to-gravity-tp10648p10687.html
The problem is that the lidar point cloud seems not in the base frame, but may be using odom frame computed externally as the base frame. What is the frame_id in the point cloud topic? In rviz, if you set the global frame to base_link, the lidar point cloud should not rotate when you rotate the lidar. It should rotate only if you set your odom frame in rviz config.
Here I show the point clouds in the supposed base frame. On one frame the Up vector of the point cloud is y+, and in the other one it is combination of y+ and z+.
Note also in the first frame the gravity vector is pointing to the ground of the point cloud, and the others the ceiling.
| Free forum by Nabble | Edit this page |