implementing rtabmap_drone_example in real drone
Posted by Samim-17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/implementing-rtabmap-drone-example-in-real-drone-tp10688.html
Hello sir, I am trying to implement this on a real drone with px4 and rpi4. what sensor does it use in simulation for holding constant altitude? I saw px4flow topic but it was not publishing anything in simulation. and you said the visual odometry must be > 10hz how do I can check that in rpi4.Also I checked rostopic hz rtabmap/odom and found to be around 2.5. Will this be issue?
Here are some of the images when we launched in real drone
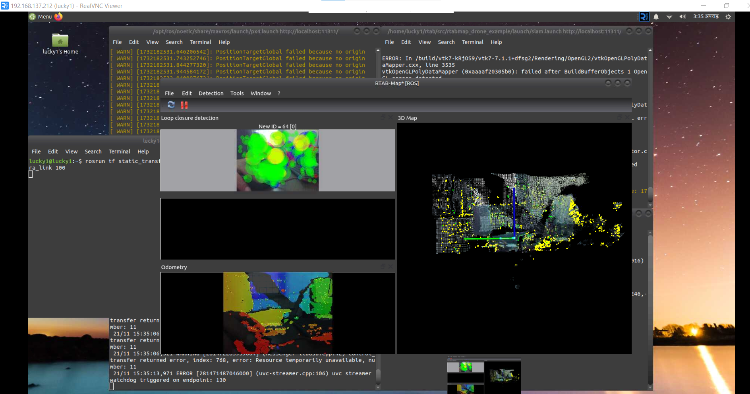
see the odometry image why is it like that not like the one in simulation?
Also I'm passing all the topic for visualization in another computer and only runnning computation in rpi4.
Do you suggest to change to jetson nano ?
URL: http://official-rtab-map-forum.206.s1.nabble.com/implementing-rtabmap-drone-example-in-real-drone-tp10688.html
Hello sir, I am trying to implement this on a real drone with px4 and rpi4. what sensor does it use in simulation for holding constant altitude? I saw px4flow topic but it was not publishing anything in simulation. and you said the visual odometry must be > 10hz how do I can check that in rpi4.Also I checked rostopic hz rtabmap/odom and found to be around 2.5. Will this be issue?
Here are some of the images when we launched in real drone
see the odometry image why is it like that not like the one in simulation?
Also I'm passing all the topic for visualization in another computer and only runnning computation in rpi4.
Do you suggest to change to jetson nano ?
| Free forum by Nabble | Edit this page |