Re: implementing rtabmap_drone_example in real drone
Posted by Samim-17 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/implementing-rtabmap-drone-example-in-real-drone-tp10688p10819.html
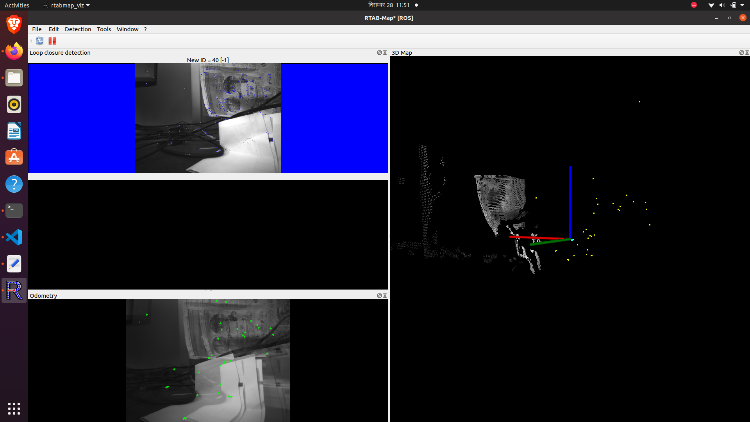
I used this to test if msckf_vio is working with Odom/Strategy set to 8. But as you see in the picture above the odom quality is 0 but in rtabmap gui the features are coming but are in opposite direction the ir images
when setting these same parameters in the slam.launch file for rtabmap_drone_example I get errors.
What may be the issue?
Also take a look at this on real drone implemenation of MSCKF_VIO
Here is a small part of launch file which I think will be necessary
"I would expect that IMU delay is always smaller than the the camera delay, so if IMU data received after image, there is something wrong about the driver. " I installed the latest librealsense driver if the driver you are talking about is the camera driver.
URL: http://official-rtab-map-forum.206.s1.nabble.com/implementing-rtabmap-drone-example-in-real-drone-tp10688p10819.html
roslaunch rtabmap_launch rtabmap.launch \ rtabmap_args:="--delete_db_on_start" \ left_image_topic:=/camera/infra1/image_rect_raw \ right_image_topic:=/camera/infra2/image_rect_raw \ left_camera_info_topic:=/camera/infra1/camera_info \ right_camera_info_topic:=/camera/infra2/camera_info \ stereo:=true
I used this to test if msckf_vio is working with Odom/Strategy set to 8. But as you see in the picture above the odom quality is 0 but in rtabmap gui the features are coming but are in opposite direction the ir images
when setting these same parameters in the slam.launch file for rtabmap_drone_example I get errors.
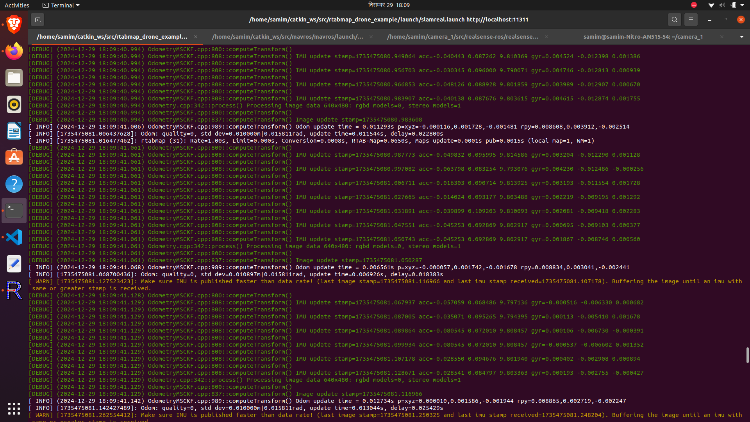
[ INFO] [1735471624.723013700]: Odom: quality=0, std dev=0.013451m|0.015811rad, update time=0.007419s, delay=0.051344s [ INFO] [1735471624.762384399]: Odom: quality=0, std dev=0.013852m|0.015811rad, update time=0.015196s, delay=0.057370s [ INFO] [1735471624.786541107]: Odom: quality=0, std dev=0.014729m|0.015811rad, update time=0.006580s, delay=0.048158s
What may be the issue?
Also take a look at this on real drone implemenation of MSCKF_VIO
[DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.208419 acc=-0.043486 0.096491 9.811581 gyr=-0.007254 0.003139 -0.001783 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.218429 acc=-0.027667 0.084424 9.809449 gyr=-0.007284 0.001291 -0.001756 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.223419 acc=-0.027667 0.084424 9.809449 gyr=-0.007457 0.000939 -0.001546 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.238429 acc=-0.051082 0.075744 9.792781 gyr=-0.007713 0.000141 -0.001119 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.243429 acc=-0.051082 0.075744 9.792781 gyr=-0.006932 -0.000172 -0.000932 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:808::computeTransform() IMU update stamp=1735475088.268429 acc=-0.025140 0.075903 9.807644 gyr=-0.006304 -0.002918 -0.001023 [DEBUG] (2024-12-29 18:09:48.271) Odometry.cpp:342::process() Processing image data 640x480: rgbd models=0, stereo models=1 [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:800::computeTransform() [DEBUG] (2024-12-29 18:09:48.271) OdometryMSCKF.cpp:837::computeTransform() Image update stamp=1735475088.251797 [ INFO] (2024-12-29 18:09:48.276) OdometryMSCKF.cpp:989::computeTransform() Odom update time = 0.005081s p=xyz=0.000053,0.001984,-0.001811 rpy=0.008455,0.006167,-0.002073 [ INFO] [1735475088.277201802]: Odom: quality=0, std dev=0.013525m|0.015811rad, update time=0.005467s, delay=0.025365s
Here is a small part of launch file which I think will be necessary
<include file="$(find rtabmap_launch)/launch/rtabmap.launch">
<arg name="localization" value="$(arg localization)"/>
<arg name="stereo" value="true"/>
<arg name="args" value="$(arg pre_args) --Odom/Strategy 8 --Optimizer/GravitySigma 0.1 --Vis/FeatureType 10 --Kp/DetectorStrategy 10 --Grid/MapFrameProjection true --NormalsSegmentation false --Grid/MaxGroundHeight 1 --Grid/MaxObstacleHeight 1.6 --RGBD/StartAtOrigin true" />
<arg name="rtabmap_viz" value="$(arg rtabmap_viz)" />
<arg name="frame_id" value="base_link" />
<arg name="odom_guess_frame_id" value="base_link_stabilized" />
<arg name="left_image_topic" value="/camera/infra1/image_rect_raw" />
<arg name="right_image_topic" value="/camera/infra2/image_rect_raw" />
<arg name="left_camera_info_topic" value="/camera/infra1/camera_info" />
<arg name="right_camera_info_topic" value="/camera/infra2/camera_info" />
<arg name="imu_topic" value="/mavros/imu/data"/>
<arg name="wait_imu_to_init" value="true"/>
<arg name="approx_sync" value="true"/>
<arg if="$(arg ground_truth)" name="ground_truth_frame_id" value="world"/>
<arg if="$(arg ground_truth)" name="ground_truth_base_frame_id" value="base_link_gt"/>
</include>"I would expect that IMU delay is always smaller than the the camera delay, so if IMU data received after image, there is something wrong about the driver. " I installed the latest librealsense driver if the driver you are talking about is the camera driver.
| Free forum by Nabble | Edit this page |