Re: Test rtabmap RGBD mapping using TUM RGBD database
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Test-rtabmap-RGBD-mapping-using-TUM-RGBD-database-tp1095p1099.html
Hi Tracy,
The TUM bags contain a TF tree that cannot be used as is with rtabmap launch files:
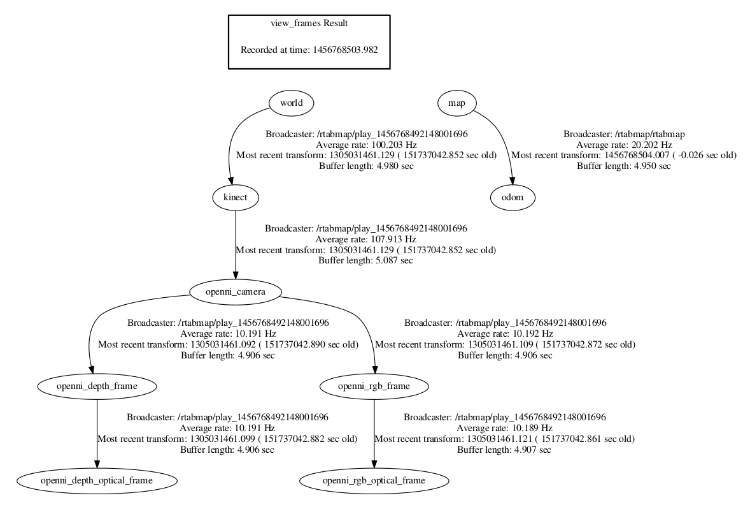
I recommend to use rgbdslam_datasets.launch file with TUM bags (like in this post or this one). Keeping the original TF tree, I fake a second tree for the mapping so that we can compare the ground truth TF (/kinect) and the estimated TF (/kinect_est) of rtabmap (make sure the TUM bags are decompressed):
For datasets with faster camera movements, you could add these rgbd_odometry parameters:
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Test-rtabmap-RGBD-mapping-using-TUM-RGBD-database-tp1095p1099.html
Hi Tracy,
The TUM bags contain a TF tree that cannot be used as is with rtabmap launch files:
I recommend to use rgbdslam_datasets.launch file with TUM bags (like in this post or this one). Keeping the original TF tree, I fake a second tree for the mapping so that we can compare the ground truth TF (/kinect) and the estimated TF (/kinect_est) of rtabmap (make sure the TUM bags are decompressed):
$ wget http://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.bag $ rosbag decompress rgbd_dataset_freiburg3_long_office_household.bag $ roslaunch rtabmap_ros rgbdslam_datasets.launch $ rosbag play --clock rgbd_dataset_freiburg3_long_office_household.bag
For datasets with faster camera movements, you could add these rgbd_odometry parameters:
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
[...]
<param name="GFTT/MinDistance" type="string" value="5"/>
<param name="Odom/MinInliers" type="string" value="10"/>
</node>
cheers,
Mathieu
| Free forum by Nabble | Edit this page |