Re: RTAB setup with a 3D LiDAR
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-setup-with-a-3D-LiDAR-tp1080p1119.html
Hi,
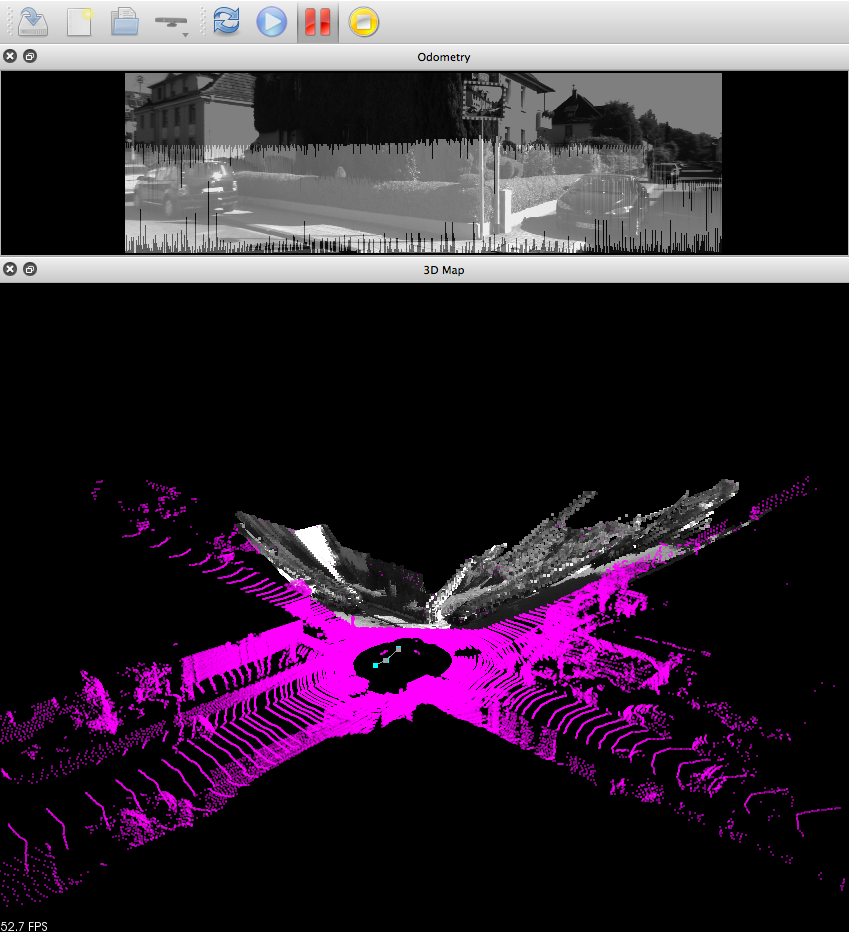
Yes, in that setup you only need a monocular camera with the Velodyne. Here are some examples of registering the point cloud of the Velodyne to a RGB camera.
1) Holes are filled between the projected points in the camera, to create a more dense depth image. Note how in that setup only the bottom of the image has valid depth values (the velodyne hits only stuff under ~3 meters, we could tilt the camera toward the ground to see more points)
2) Holes are filled up to border of the image
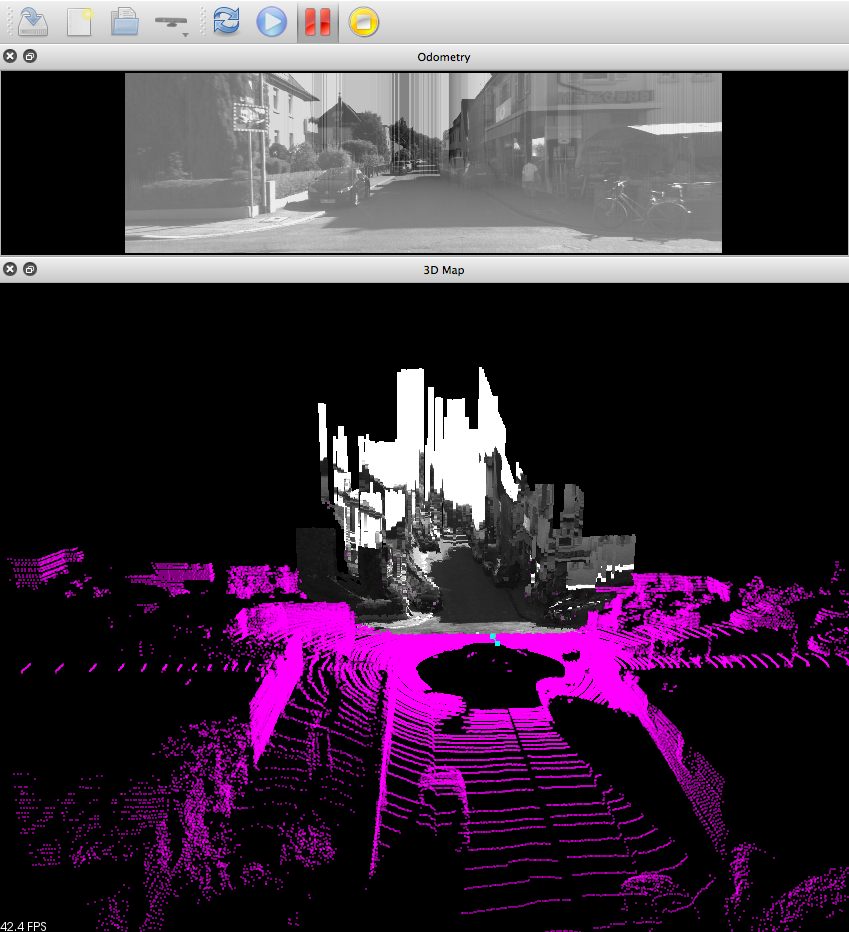
While the depth is interpolated, visual odometry can be done as a guess for ICP, thus giving a precise odometry. The resolution of the RGB camera doesn't need to be high (1024x768 is fine). I think that having a ZED camera could give a better guess to ICP. However, ICP with velodyne data is quite good to correct poor guesses (so many points over 360 degrees!).
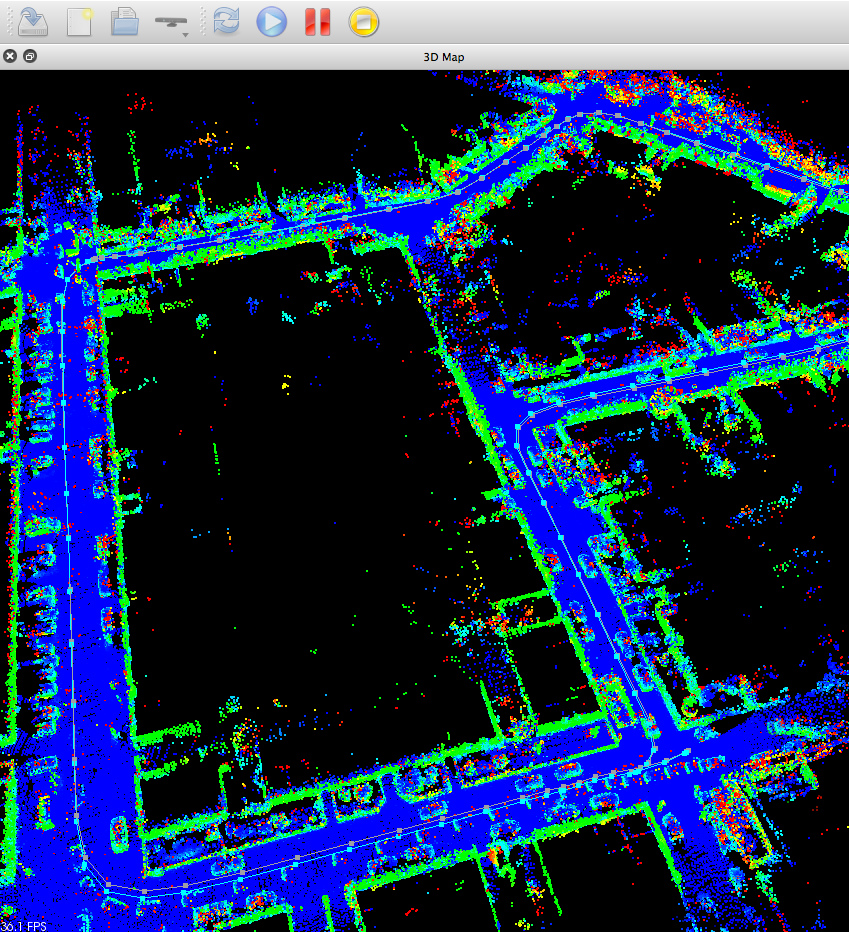
Here is an example of assembled scans after mapping with mono RGB+Velodyne (gray line is the ground truth, cyan line is the estimated trajectory):
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-setup-with-a-3D-LiDAR-tp1080p1119.html
Hi,
Yes, in that setup you only need a monocular camera with the Velodyne. Here are some examples of registering the point cloud of the Velodyne to a RGB camera.
1) Holes are filled between the projected points in the camera, to create a more dense depth image. Note how in that setup only the bottom of the image has valid depth values (the velodyne hits only stuff under ~3 meters, we could tilt the camera toward the ground to see more points)
2) Holes are filled up to border of the image
While the depth is interpolated, visual odometry can be done as a guess for ICP, thus giving a precise odometry. The resolution of the RGB camera doesn't need to be high (1024x768 is fine). I think that having a ZED camera could give a better guess to ICP. However, ICP with velodyne data is quite good to correct poor guesses (so many points over 360 degrees!).
Here is an example of assembled scans after mapping with mono RGB+Velodyne (gray line is the ground truth, cyan line is the estimated trajectory):
cheers
| Free forum by Nabble | Edit this page |