Re: Bunlder export: what poses ?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bunlder-export-what-poses-tp11037p11201.html
Hi Pierre,
I verified, and there should not be any BA when iteration=0. Features still need to be re-matched, so it is why it still take a while to export. I however added more logs to confirm this and fixed an issue where SuperGlue was not used when BA iteration >0.
In this database, I don't see a large difference between before and after BA. Here before and after BA respectively, with a side-view of some point clouds that should represent the same surface:
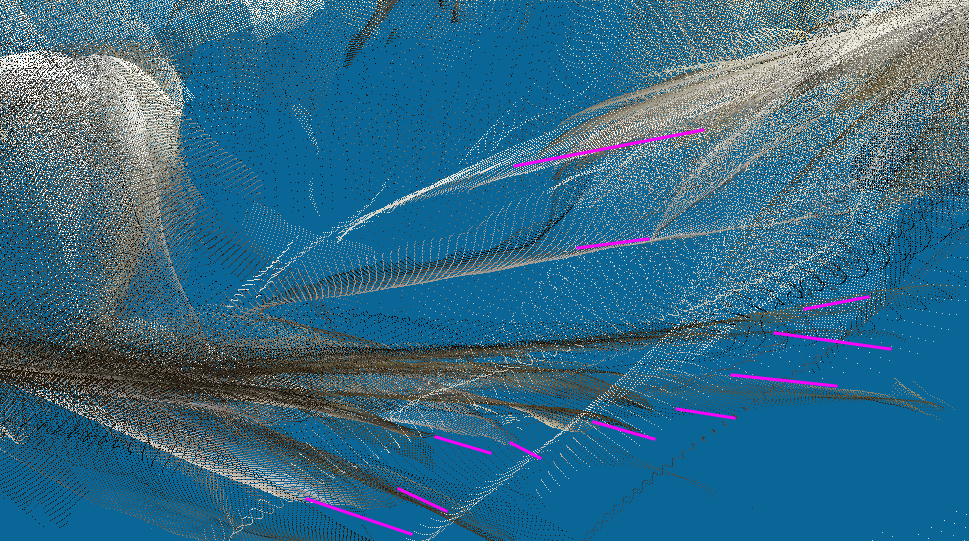
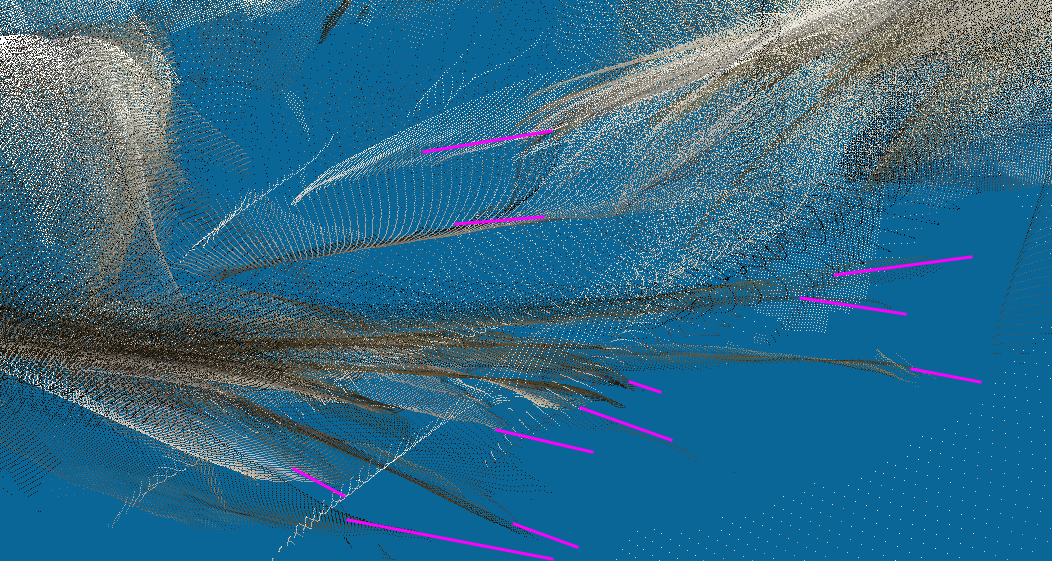
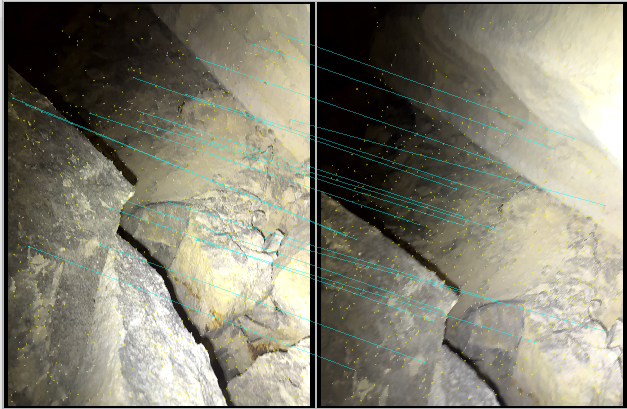
The problem here is not BA or not BA (results look very similar), it is that the depth is poorly estimated from the raw input. When assembling a mesh, having overlapping surfaces like this would produce unpredictable effect depending on Poisson depth value (I would recommend to set it the lowest as possible, like between 6 and 8). Here is a comparison between two frames. We can see in one frame the rocks formation produces a bump in the depth, while the same rocks in the other frame are completely flat.

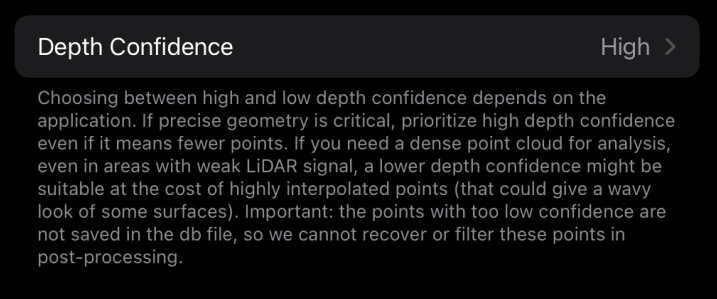
Which iPhone or iPad model are you using? Which iOS version? In RTAB-Map's App, what is the value set in Depth Confidence parameter? These results are concerning if ARKit relying less and less on LiDAR data to compute depth values. For me, this kind of depth looks more like coming from a not so accurate monocular camera depth estimation approach than LiDAR-based depth (unless the LiDAR data is super wrong).
Regards,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bunlder-export-what-poses-tp11037p11201.html
Hi Pierre,
I verified, and there should not be any BA when iteration=0. Features still need to be re-matched, so it is why it still take a while to export. I however added more logs to confirm this and fixed an issue where SuperGlue was not used when BA iteration >0.
In this database, I don't see a large difference between before and after BA. Here before and after BA respectively, with a side-view of some point clouds that should represent the same surface:
The problem here is not BA or not BA (results look very similar), it is that the depth is poorly estimated from the raw input. When assembling a mesh, having overlapping surfaces like this would produce unpredictable effect depending on Poisson depth value (I would recommend to set it the lowest as possible, like between 6 and 8). Here is a comparison between two frames. We can see in one frame the rocks formation produces a bump in the depth, while the same rocks in the other frame are completely flat.
Which iPhone or iPad model are you using? Which iOS version? In RTAB-Map's App, what is the value set in Depth Confidence parameter? These results are concerning if ARKit relying less and less on LiDAR data to compute depth values. For me, this kind of depth looks more like coming from a not so accurate monocular camera depth estimation approach than LiDAR-based depth (unless the LiDAR data is super wrong).
Regards,
Mathieu
| Free forum by Nabble | Edit this page |