Re: Using RTAB with Manipulator
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-RTAB-with-Manipulator-tp11147p11202.html
By "SLAM on the end-effector", I means estimating the robot and/or camera position based on SLAM done with the camera.
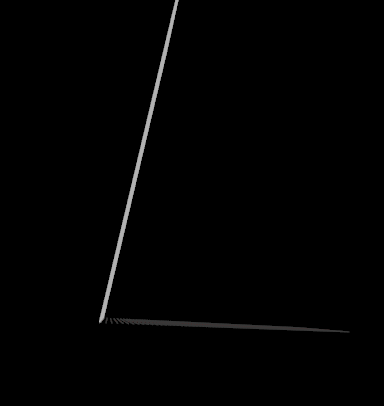
It seems the camera calibration may be wrong, here the wall and the floor doesn't appear 90 deg in the generated depth image:
I see that there are 83 captures in the map, so adding them seem working, tohugh most of them the robot is not moving. Here is a top view of some of them colored per capture:
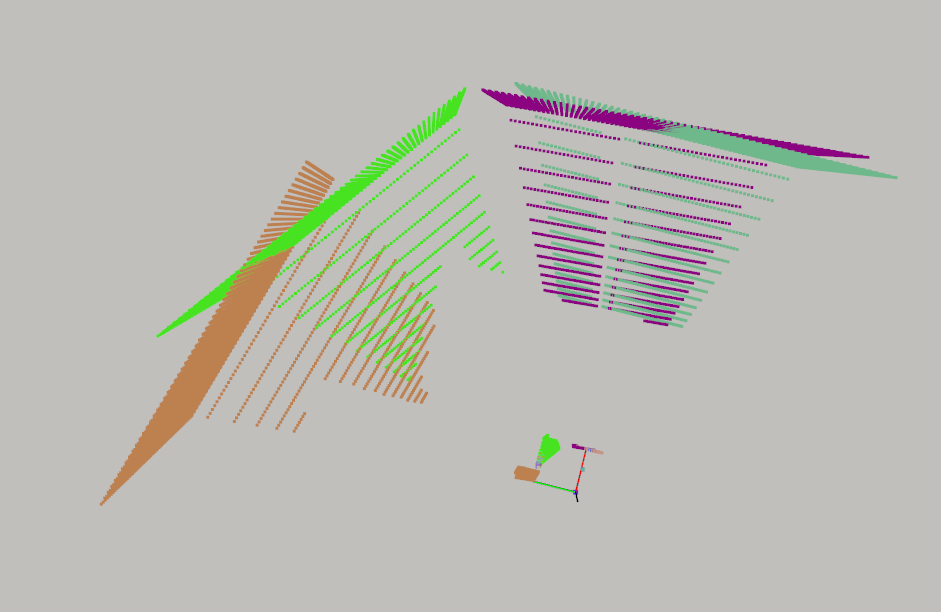
Note how they don't align well together, it could be related to bad calibration parameters of the camera.
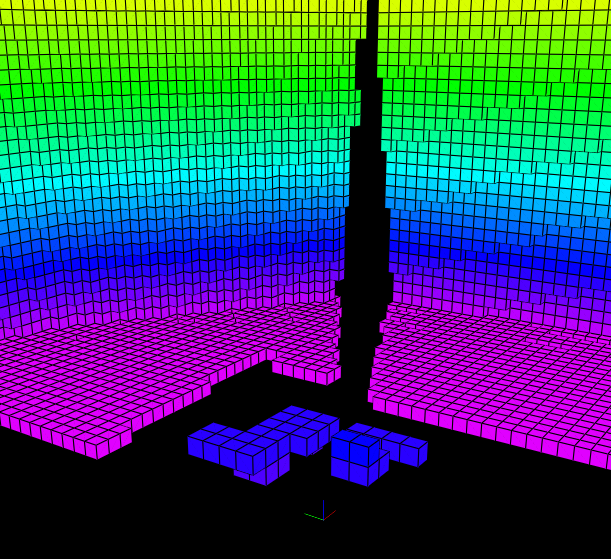
Looking at the processing time, you could even increase to 5 Hz if you want. However, as soon as you would subscribe to OctoMap output, it may require more CPU. You can set Grid/NormalsSegmentation to false, and set Grid/RangeMax to 10 to capture the background walls in the octomap, like this:
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-RTAB-with-Manipulator-tp11147p11202.html
By "SLAM on the end-effector", I means estimating the robot and/or camera position based on SLAM done with the camera.
It seems the camera calibration may be wrong, here the wall and the floor doesn't appear 90 deg in the generated depth image:
I see that there are 83 captures in the map, so adding them seem working, tohugh most of them the robot is not moving. Here is a top view of some of them colored per capture:
Note how they don't align well together, it could be related to bad calibration parameters of the camera.
Looking at the processing time, you could even increase to 5 Hz if you want. However, as soon as you would subscribe to OctoMap output, it may require more CPU. You can set Grid/NormalsSegmentation to false, and set Grid/RangeMax to 10 to capture the background walls in the octomap, like this:
cheers,
Mathieu
| Free forum by Nabble | Edit this page |