Re: Global Optimizing with Loop Closure and Navigation After Mapping.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Global-Optimizing-with-Loop-Closure-and-Navigation-After-Mapping-tp11061p11394.html
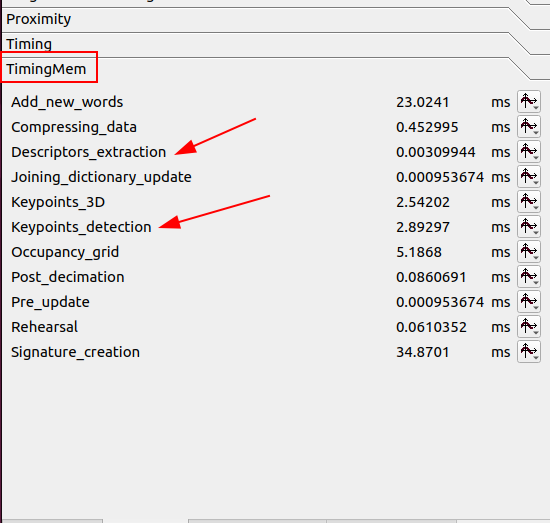
In terms of timing performance, you can open Statistics panel in rtabmap_viz and open TimingMem tab. For feature detectors, look at statistics like "Keypoints_detection" and "Descriptors_extraction". If you feed odometry info topic to rtabmap_viz (subscribe_odom_info:=true), there will be also an Odometry tab that will show up with some statistics. If you change also features for visual odometry, this is where you would see the differences.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Global-Optimizing-with-Loop-Closure-and-Navigation-After-Mapping-tp11061p11394.html
In terms of timing performance, you can open Statistics panel in rtabmap_viz and open TimingMem tab. For feature detectors, look at statistics like "Keypoints_detection" and "Descriptors_extraction". If you feed odometry info topic to rtabmap_viz (subscribe_odom_info:=true), there will be also an Odometry tab that will show up with some statistics. If you change also features for visual odometry, this is where you would see the differences.
| Free forum by Nabble | Edit this page |