Combining RTAB-Map with the navigation stack
Posted by icolwell on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Combining-RTAB-Map-with-the-navigation-stack-tp1171.html
Hello There,
I have been using RTAB-Map to generate a map and localize within it. It is awesome! works really well.
My setup is a clearpath husky, hokuyo laser scanner, and a kinect.
I have two main questions/issues that have been bothering me:
Question 1:
I am trying to use the navigation stack with RTAB-Map. I am using a clearpath husky so I copied all the navigation configs from their gazebo amcl_demo and then simply remapped the RTAB-Map grid_map into the map topic for move_base navigation stack. I believe this is very similar to the turtlebot example:
http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
It worked, the global cost map was generated using grid_map and the local costmap was being created from the laser and kinect data. Now, the only thing that was strange was that the grid_map from RTAB-Map kept updating or something, it wasn't static. The following output kept being generated:
[ INFO] [1458945016.268542996]: Resizing costmap to 171 X 175 at 0.050000 m/pix
Why is the grid_map updating while in localization mode? I assumed RTAB-Map localization mode would simply load up the saved occupancy grid and try to place the robot in the saved static map. Maybe I am missing something.
Question 2:
When the laser data is fed into RTAB-Map in mapping mode it generates this weird shape behind the robot on grid_map (see below)
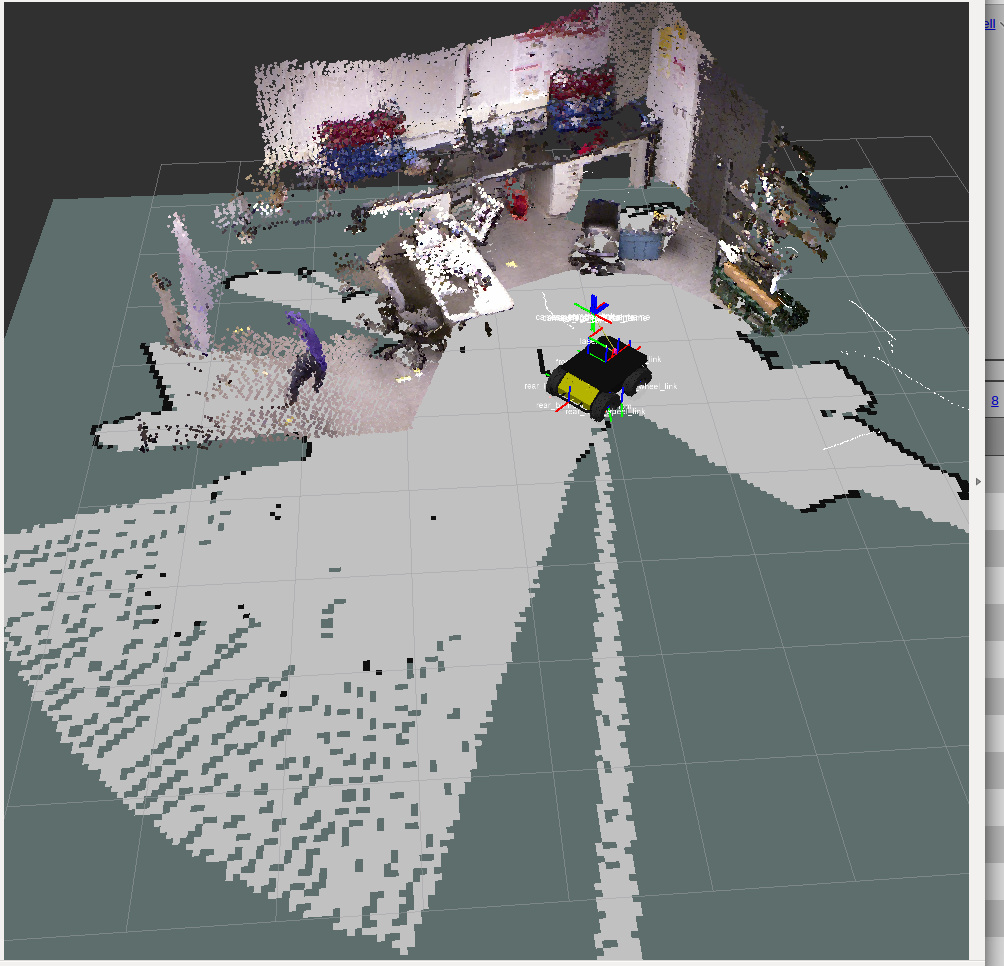
The shape is extending out directly behind the robot which is super strange because both the kinect and the laser are pointing 180 degrees the other way. The laser scanner has a FOV of 180 so I'm not sure why this shape is being generated. Also, it doesn't appear to actually have any effect on the grid_map. Basically, the shape does not clear out any free cells that were previously occupied or previously empty. Also, when we change the FOV setting of our laser scanner it changes the FOV of this strange shape, so it is definitely related to the laser scanner.
My best guess is that RTAB-Map is confused about the laser scanner config or settings or something.
Any clarification will be greatly appreciated!
Thanks!
Ian
URL: http://official-rtab-map-forum.206.s1.nabble.com/Combining-RTAB-Map-with-the-navigation-stack-tp1171.html
Hello There,
I have been using RTAB-Map to generate a map and localize within it. It is awesome! works really well.
My setup is a clearpath husky, hokuyo laser scanner, and a kinect.
I have two main questions/issues that have been bothering me:
Question 1:
I am trying to use the navigation stack with RTAB-Map. I am using a clearpath husky so I copied all the navigation configs from their gazebo amcl_demo and then simply remapped the RTAB-Map grid_map into the map topic for move_base navigation stack. I believe this is very similar to the turtlebot example:
http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
It worked, the global cost map was generated using grid_map and the local costmap was being created from the laser and kinect data. Now, the only thing that was strange was that the grid_map from RTAB-Map kept updating or something, it wasn't static. The following output kept being generated:
[ INFO] [1458945016.268542996]: Resizing costmap to 171 X 175 at 0.050000 m/pix
Why is the grid_map updating while in localization mode? I assumed RTAB-Map localization mode would simply load up the saved occupancy grid and try to place the robot in the saved static map. Maybe I am missing something.
Question 2:
When the laser data is fed into RTAB-Map in mapping mode it generates this weird shape behind the robot on grid_map (see below)
The shape is extending out directly behind the robot which is super strange because both the kinect and the laser are pointing 180 degrees the other way. The laser scanner has a FOV of 180 so I'm not sure why this shape is being generated. Also, it doesn't appear to actually have any effect on the grid_map. Basically, the shape does not clear out any free cells that were previously occupied or previously empty. Also, when we change the FOV setting of our laser scanner it changes the FOV of this strange shape, so it is definitely related to the laser scanner.
My best guess is that RTAB-Map is confused about the laser scanner config or settings or something.
Any clarification will be greatly appreciated!
Thanks!
Ian
| Free forum by Nabble | Edit this page |