Using obstacles detection nodelet from camera node point cloud
Posted by bbeckvold on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-obstacles-detection-nodelet-from-camera-node-point-cloud-tp1191.html
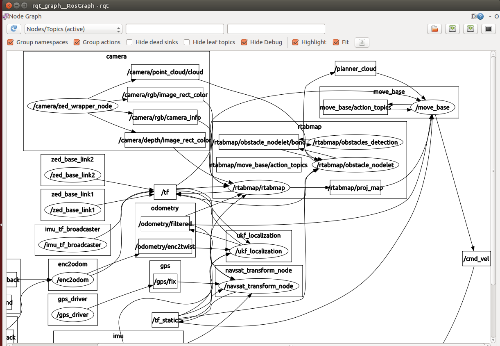
We are using the StereoLabs Zed depth camera and attempting to feed it's generated point cloud into the obstacles detection nodelet. The Zed camera generates the depth cloud directly (using CUDA in our onboard GPU) and then published the PointCloud2 message. Rtabmap can read the image data from the Zed just fine but we need the ground part stripped out with the nodelet.
The nodelet is setup to subscribe to the correct "camera/point_cloud/cloud" topic and it publishes on a new topic to the move_base through "planner_cloud". The problem seems to be that the obstacle_detection nodelet isn't publishing any data at all on the planner_cloud topic. Here is the warning message we are receiving, which looks to be generated by costmap_2d:
[ WARN] [1459553569.486509890]: The /planner_cloud observation buffer has not been updated for 4.04 seconds, and it should be updated every 0.50 seconds.
We believe that the issue is with the nodelet because we can send the point cloud directly to move_base from the camera, but it has the ground piece which is causing navigation problems. We also assume that they need to be in the same process but are not sure of how this might be implemented.
Any help would be appreciated.
-Ben
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-obstacles-detection-nodelet-from-camera-node-point-cloud-tp1191.html
We are using the StereoLabs Zed depth camera and attempting to feed it's generated point cloud into the obstacles detection nodelet. The Zed camera generates the depth cloud directly (using CUDA in our onboard GPU) and then published the PointCloud2 message. Rtabmap can read the image data from the Zed just fine but we need the ground part stripped out with the nodelet.
The nodelet is setup to subscribe to the correct "camera/point_cloud/cloud" topic and it publishes on a new topic to the move_base through "planner_cloud". The problem seems to be that the obstacle_detection nodelet isn't publishing any data at all on the planner_cloud topic. Here is the warning message we are receiving, which looks to be generated by costmap_2d:
[ WARN] [1459553569.486509890]: The /planner_cloud observation buffer has not been updated for 4.04 seconds, and it should be updated every 0.50 seconds.
We believe that the issue is with the nodelet because we can send the point cloud directly to move_base from the camera, but it has the ground piece which is causing navigation problems. We also assume that they need to be in the same process but are not sure of how this might be implemented.
Any help would be appreciated.
-Ben
| Free forum by Nabble | Edit this page |