Re: ROS - 2D occupancy grid
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1210.html
In rtabmapviz, you can right-click on the GraphView to save the map:
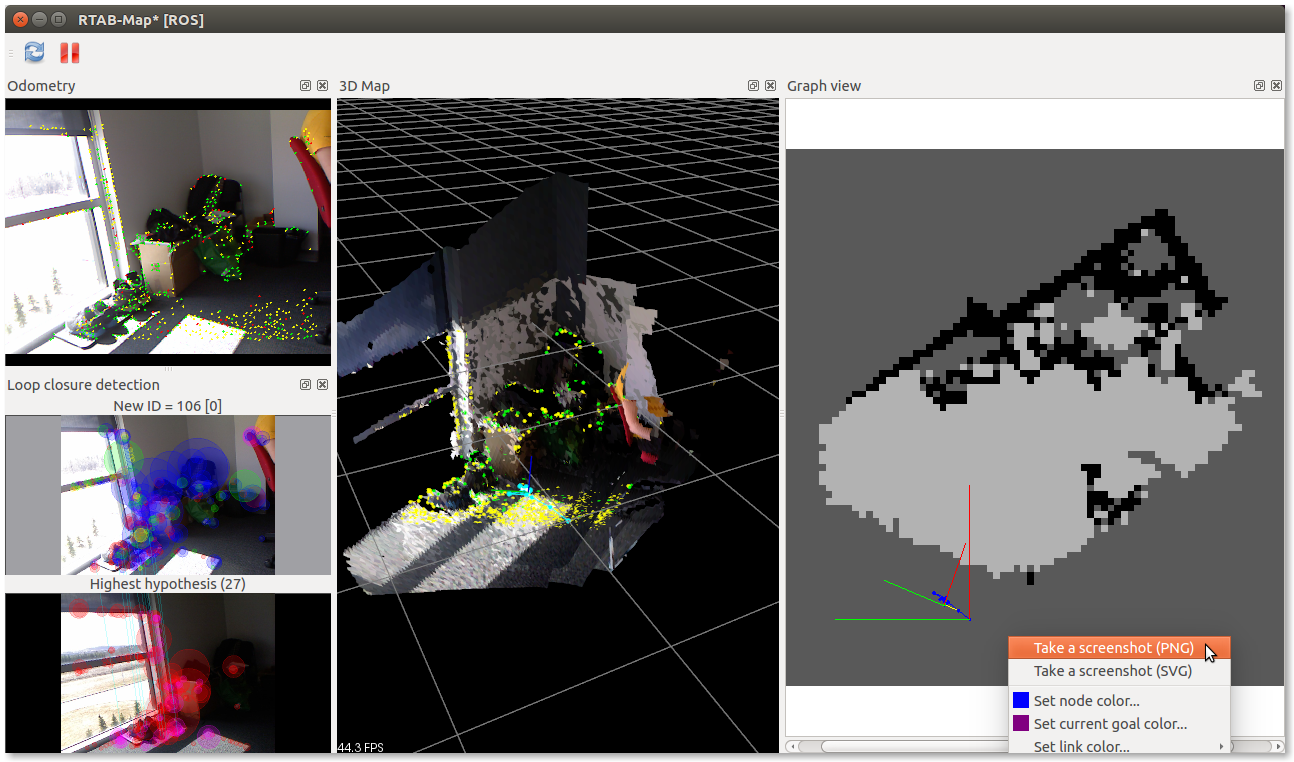
The resulting map is saved by default on ROS in "~/.ros/ScreensCaptured" folder. Each cell corresponds to 1 pixel, by default it is 5 cm / cell:

I updated the context menu to hide the graph for example, if we just want the map. The example above was done live (with a Kinect):
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1210.html
In rtabmapviz, you can right-click on the GraphView to save the map:
The resulting map is saved by default on ROS in "~/.ros/ScreensCaptured" folder. Each cell corresponds to 1 pixel, by default it is 5 cm / cell:
I updated the context menu to hide the graph for example, if we just want the map. The example above was done live (with a Kinect):
$ roslaunch freenect_launch freenect.launch depth_registration:=true $ roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" // In rtabmapviz, open Preferences->3D Rendering, then check // "Occupancy from 3D cloud projection on the ground." Click ok, // then show up the Graph View in Window->Show view... ->Graph view.
cheers
| Free forum by Nabble | Edit this page |