Re: ROS - 2D occupancy grid
Posted by senia on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1215.html
Hi,
Mapping with Kinect works GREAT - thank you very much.
Yet I encountered a new problem, mapping using Intel R200.
I'm using the official ROS RealSense drivers, with a resize image package for the depth stream, as the r200 only give 628x468 depth resolution( that need to match the color normal resolution of 640x480 ).
And I noticed that the pointcloud is flipped:
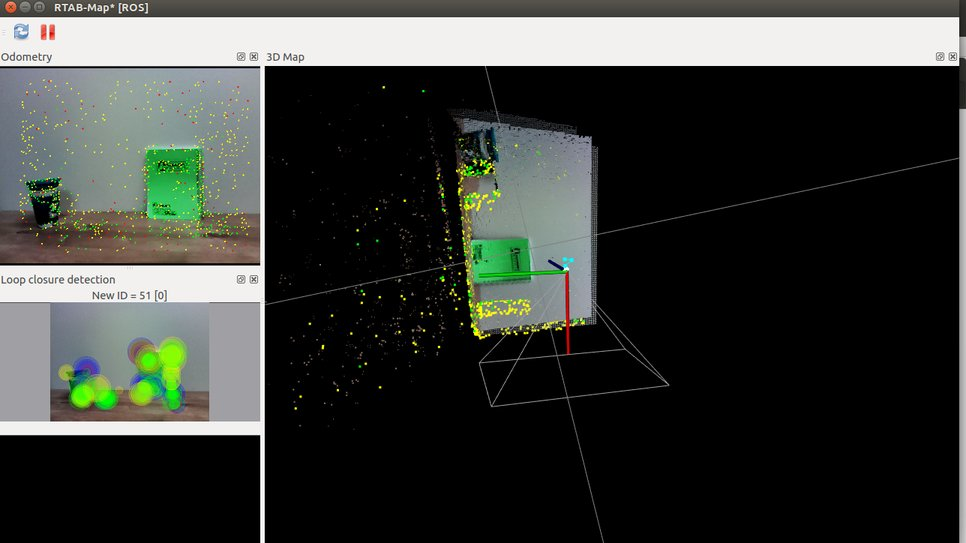
I tried to flip it(90 degrees) inside the resize-image package, yet Rtabmap displaye and problem stayes the same, which destroys my 2D map, as its like I start mapping sideways and not straight ahead as should.
Could you point out where I could change the axis settings for a quick fix?
Other small issue I saw, compiling rtabmap_ros with g2o ROS binaries(ros-indigo-libg2o) causes a crash at launch without any signs or messages(found it only with gdb), so I think built from source is not just faster, but essential.
Thanks.
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1215.html
Hi,
Mapping with Kinect works GREAT - thank you very much.
Yet I encountered a new problem, mapping using Intel R200.
I'm using the official ROS RealSense drivers, with a resize image package for the depth stream, as the r200 only give 628x468 depth resolution( that need to match the color normal resolution of 640x480 ).
And I noticed that the pointcloud is flipped:
I tried to flip it(90 degrees) inside the resize-image package, yet Rtabmap displaye and problem stayes the same, which destroys my 2D map, as its like I start mapping sideways and not straight ahead as should.
Could you point out where I could change the axis settings for a quick fix?
Other small issue I saw, compiling rtabmap_ros with g2o ROS binaries(ros-indigo-libg2o) causes a crash at launch without any signs or messages(found it only with gdb), so I think built from source is not just faster, but essential.
Thanks.
| Free forum by Nabble | Edit this page |