Re: ROS - 2D occupancy grid
Posted by senia on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1226.html
Hi,
Setting your code(R200 with the above driver, camera frame is by default "r200_frame") at the beginning of the "rgbd_mapping" launch file, and launching with "frame_id:=base_link" argument fixed it. Don't now how you hit the right transform from the first try. I liked the use of frustum (just maybe make the base a little longer - to sign as the bottom)
Thank you very much, the 2D map is now getting perfect(allmost-perfect, as the R200 has a lot of noise compared to the kinect).
One last question, do you know if this(tea cup) offset (rgb vs depth):
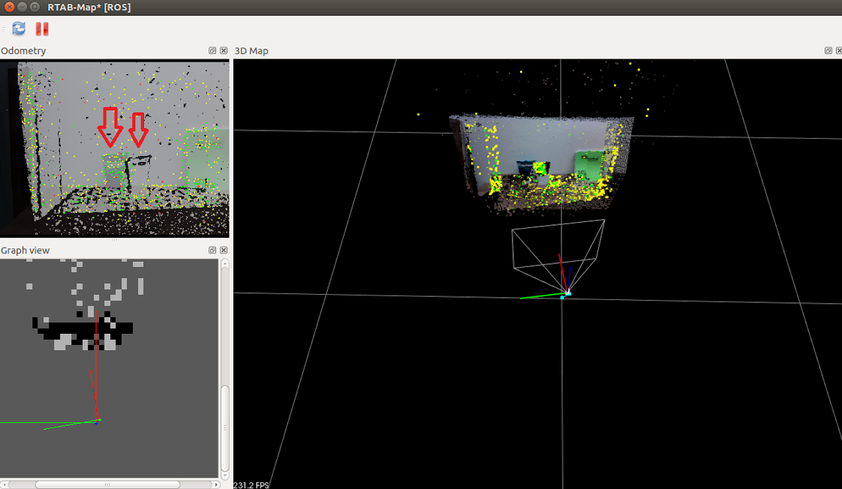
is created by an un-calibrated camera, or there maybe other reason for that? As calibration fails to commit/upload the calibration info to the R200 camera(service "set_camera_info" not found), and I haven't found an option to add external calibration info(.yaml) to rtabmap in ros.
Thanks.
URL: http://official-rtab-map-forum.206.s1.nabble.com/ROS-2D-occupancy-grid-tp1204p1226.html
Hi,
Setting your code(R200 with the above driver, camera frame is by default "r200_frame") at the beginning of the "rgbd_mapping" launch file, and launching with "frame_id:=base_link" argument fixed it. Don't now how you hit the right transform from the first try. I liked the use of frustum (just maybe make the base a little longer - to sign as the bottom)
Thank you very much, the 2D map is now getting perfect(allmost-perfect, as the R200 has a lot of noise compared to the kinect).
One last question, do you know if this(tea cup) offset (rgb vs depth):
is created by an un-calibrated camera, or there maybe other reason for that? As calibration fails to commit/upload the calibration info to the R200 camera(service "set_camera_info" not found), and I haven't found an option to add external calibration info(.yaml) to rtabmap in ros.
Thanks.
| Free forum by Nabble | Edit this page |