Rtabmap mapping done but can't do relocalization
Posted by zelda on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257.html
Hello Matlabbe
First of all, I really thank you for the great work. I am following the instructions from your site and am being fascinated.
However, I am stuck now.. ToT
I was following this instruction, http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
Steps until Mapping was fine. I could build 3d map. Also, When I launch with localization:=true option, it works.
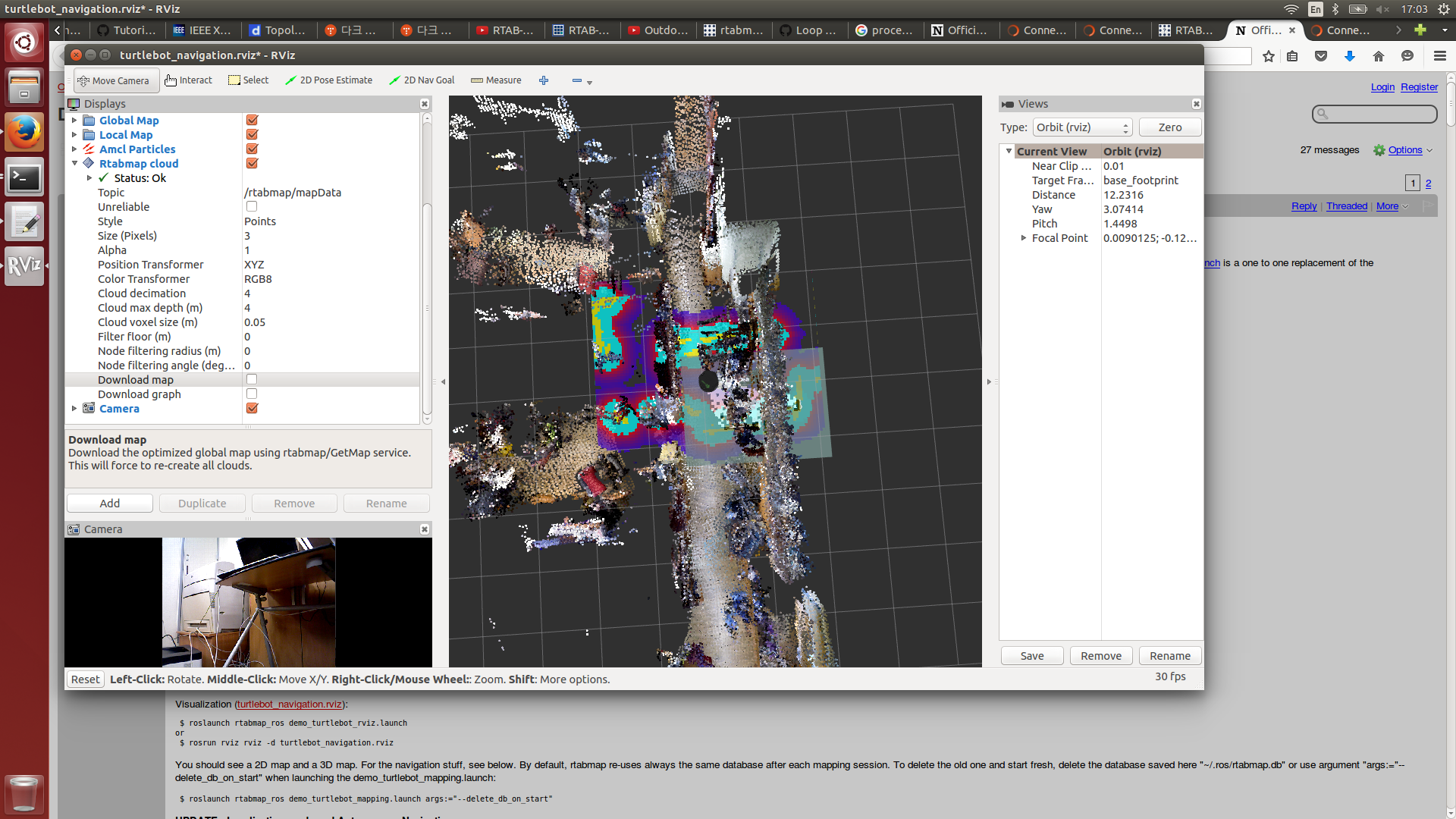
I visualized it with $roslaunch rtabmap_ros demo_turtlebot_rviz.launch and downloaded the point clouds from
rtabmap.db, via checking boxes 1)Download map, 2)Download graph consequently.
Here comes the problem. First of all, downloaded 3d graph doesn't seem to match with turtlebot's current position and
direction. It is shown in the picture.(corridor of map and corridor of point clouds have different direction). Should i always
set the turtlebot's position and direction to correct initial state?
At first I thought this would be solved if relocalization is done. But Most important problem here. My Turtlebot can't find
loop closure. I moved it via teleop, rotated around the exact place I used for mapping, but nothing happens.
I don't know why. I wanted to check .db file but I don't know how to.
1) Is there possibility that pictures during the mapping is not saved to .db file?
It is quite out-of-pint story, but when I made data_throttled topics following instructions here http://official-rtab-map-forum.206.s1.nabble.com/How-can-I-record-data-in-ROS-for-rtabmap-td74.html
and record it, and then check .bag with rosbag info, I couldn't find data_throttled topics in there, diffent with bag files I downloaded on your tutorial site. So I am always suspicious that whether pictures are being saved to .db file.
2)It is just one corridor way. Should it be effected with Loop closure?
The picture is when I started with localization option, visualize with rviz and download point cloud, without finding loop closure.
Thanks for reading.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257.html
Hello Matlabbe
First of all, I really thank you for the great work. I am following the instructions from your site and am being fascinated.
However, I am stuck now.. ToT
I was following this instruction, http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
Steps until Mapping was fine. I could build 3d map. Also, When I launch with localization:=true option, it works.
I visualized it with $roslaunch rtabmap_ros demo_turtlebot_rviz.launch and downloaded the point clouds from
rtabmap.db, via checking boxes 1)Download map, 2)Download graph consequently.
Here comes the problem. First of all, downloaded 3d graph doesn't seem to match with turtlebot's current position and
direction. It is shown in the picture.(corridor of map and corridor of point clouds have different direction). Should i always
set the turtlebot's position and direction to correct initial state?
At first I thought this would be solved if relocalization is done. But Most important problem here. My Turtlebot can't find
loop closure. I moved it via teleop, rotated around the exact place I used for mapping, but nothing happens.
I don't know why. I wanted to check .db file but I don't know how to.
1) Is there possibility that pictures during the mapping is not saved to .db file?
It is quite out-of-pint story, but when I made data_throttled topics following instructions here http://official-rtab-map-forum.206.s1.nabble.com/How-can-I-record-data-in-ROS-for-rtabmap-td74.html
and record it, and then check .bag with rosbag info, I couldn't find data_throttled topics in there, diffent with bag files I downloaded on your tutorial site. So I am always suspicious that whether pictures are being saved to .db file.
2)It is just one corridor way. Should it be effected with Loop closure?
The picture is when I started with localization option, visualize with rviz and download point cloud, without finding loop closure.
Thanks for reading.
| Free forum by Nabble | Edit this page |