Re: Rtabmap mapping done but can't do relocalization
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257p1266.html
Hi,
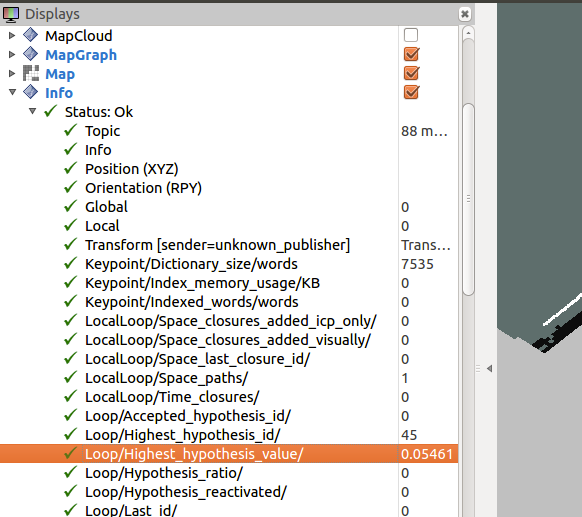
Images like that (a lot of visual features) should trigger a loop closure. You can add rtabmap_ros/Info display in RVIZ and look for statistic called "Loop/Highest_hypothesis_value". When the value is >=0.11, a loop closure is detected. If this value is over 0.11 and relocation still not working, look in the terminal for possible warnings like "Loop closure rejected because ...".
1) When you click on "Download map", all images from the database are downloaded to RVIZ. If you are on WIFI and the map is large, the RVIZ message box may turn gray, just wait. This updates the MapCloud's cache with the old map(s). However, the clouds may disappear (but it is still in RVIZ cache) if rtabmap is running on the robot and that no relocation happened yet (empty graph is sent to RVIZ each second). On loop closure, the 3D map should reappear (with corresponding 2D occupancy grid) as now the new session is linked to old map(s).
p.s1) Yes, the argument is "database_path" (default is "~/.ros/rtabmap.db").
p.2) RTAB-Map supports multi-session mapping. If you omit "--delete_db_on_start" argument, rtabmap will load the database and starts a new map. On loop closure with a location in a previous maps in the database, it will merge the new map with the previous one. The localization mode does exactly the same, but it doesn't create a new map (i.e., the map published will be empty until a loop closure is found).
p.s3) great!
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257p1266.html
Hi,
Images like that (a lot of visual features) should trigger a loop closure. You can add rtabmap_ros/Info display in RVIZ and look for statistic called "Loop/Highest_hypothesis_value". When the value is >=0.11, a loop closure is detected. If this value is over 0.11 and relocation still not working, look in the terminal for possible warnings like "Loop closure rejected because ...".
1) When you click on "Download map", all images from the database are downloaded to RVIZ. If you are on WIFI and the map is large, the RVIZ message box may turn gray, just wait. This updates the MapCloud's cache with the old map(s). However, the clouds may disappear (but it is still in RVIZ cache) if rtabmap is running on the robot and that no relocation happened yet (empty graph is sent to RVIZ each second). On loop closure, the 3D map should reappear (with corresponding 2D occupancy grid) as now the new session is linked to old map(s).
p.s1) Yes, the argument is "database_path" (default is "~/.ros/rtabmap.db").
p.2) RTAB-Map supports multi-session mapping. If you omit "--delete_db_on_start" argument, rtabmap will load the database and starts a new map. On loop closure with a location in a previous maps in the database, it will merge the new map with the previous one. The localization mode does exactly the same, but it doesn't create a new map (i.e., the map published will be empty until a loop closure is found).
p.s3) great!
| Free forum by Nabble | Edit this page |