RE: RE: RE: Re: Rtabmap mapping done but can't do relocalization
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257p1280.html
The wait_for_transform parameter is here. For "robot.launch.xml", maybe it is not the one used by your robot. Try to track down where the robot_state_publisher is created in your launch files.
Make sure the goal topic sent is correctly sent to move_base.
If it can help, I tried again the Mapping and Navigation Tutorial (with robot.launch.xml frequency set to 10 Hz). I don't have the robot, so I should follow the last section:
1)
2)
3) Drop a 2D nav goal in RVIZ, show the local planner path for debugging (hide the robot model to see it, the green line below!)
Well, if I had a robot, it think it would move as the velocity values are sent.
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-done-but-can-t-do-relocalization-tp1257p1280.html
The wait_for_transform parameter is here. For "robot.launch.xml", maybe it is not the one used by your robot. Try to track down where the robot_state_publisher is created in your launch files.
Make sure the goal topic sent is correctly sent to move_base.
If it can help, I tried again the Mapping and Navigation Tutorial (with robot.launch.xml frequency set to 10 Hz). I don't have the robot, so I should follow the last section:
1)
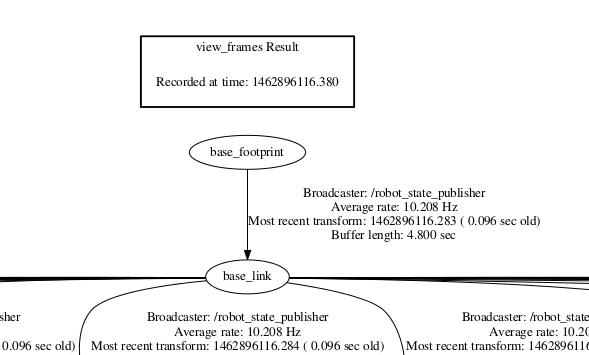
$ roslaunch turtlebot_bringup minimal.launchI have 10 Hz frames:
2)
$ export TURTLEBOT_3D_SENSOR=kinect $ roslaunch rtabmap_ros demo_turtlebot_mapping.launch args:="--delete_db_on_start" rgbd_odometry:=true $ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
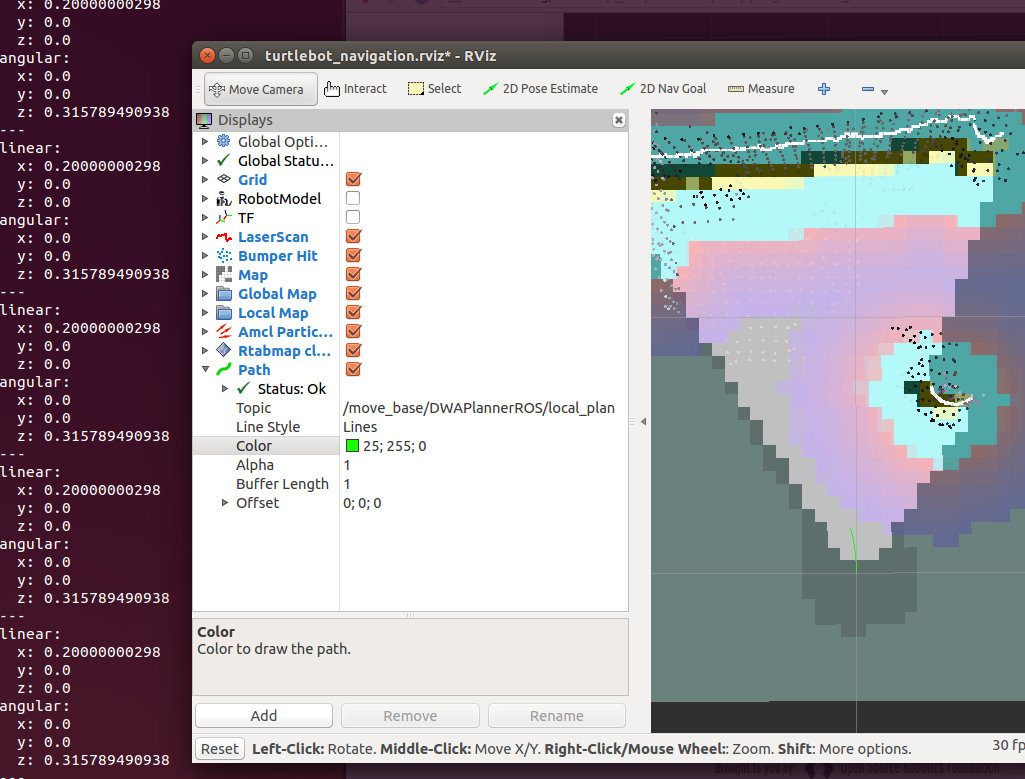
3) Drop a 2D nav goal in RVIZ, show the local planner path for debugging (hide the robot model to see it, the green line below!)
$ rostopic echo /mobile_base/commands/velocity --- linear: x: 0.12500000298 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.347368433601 --- linear: x: 0.0500000029802 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.378947376264 ...
Well, if I had a robot, it think it would move as the velocity values are sent.
cheers
| Free forum by Nabble | Edit this page |