Re: RGB-D SLAM example on ROS and Raspberry Pi 3
Posted by Lewthie on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-SLAM-example-on-ROS-and-Raspberry-Pi-3-tp1250p1364.html
Hi Mathieu,
I installed it with
It's a bit hard to see under the point cloud but it seems to be working as intended. The bottom picture is the updated output of rqt_graph.
While this does look like what I need, I'm still curious as to why this doesn't run on rtabmapviz and why the parameters aren't being recognized. Am I meant to install it from source as well as the ros wrapper?
Thanks so much for your help so far.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-SLAM-example-on-ROS-and-Raspberry-Pi-3-tp1250p1364.html
Hi Mathieu,
I installed it with
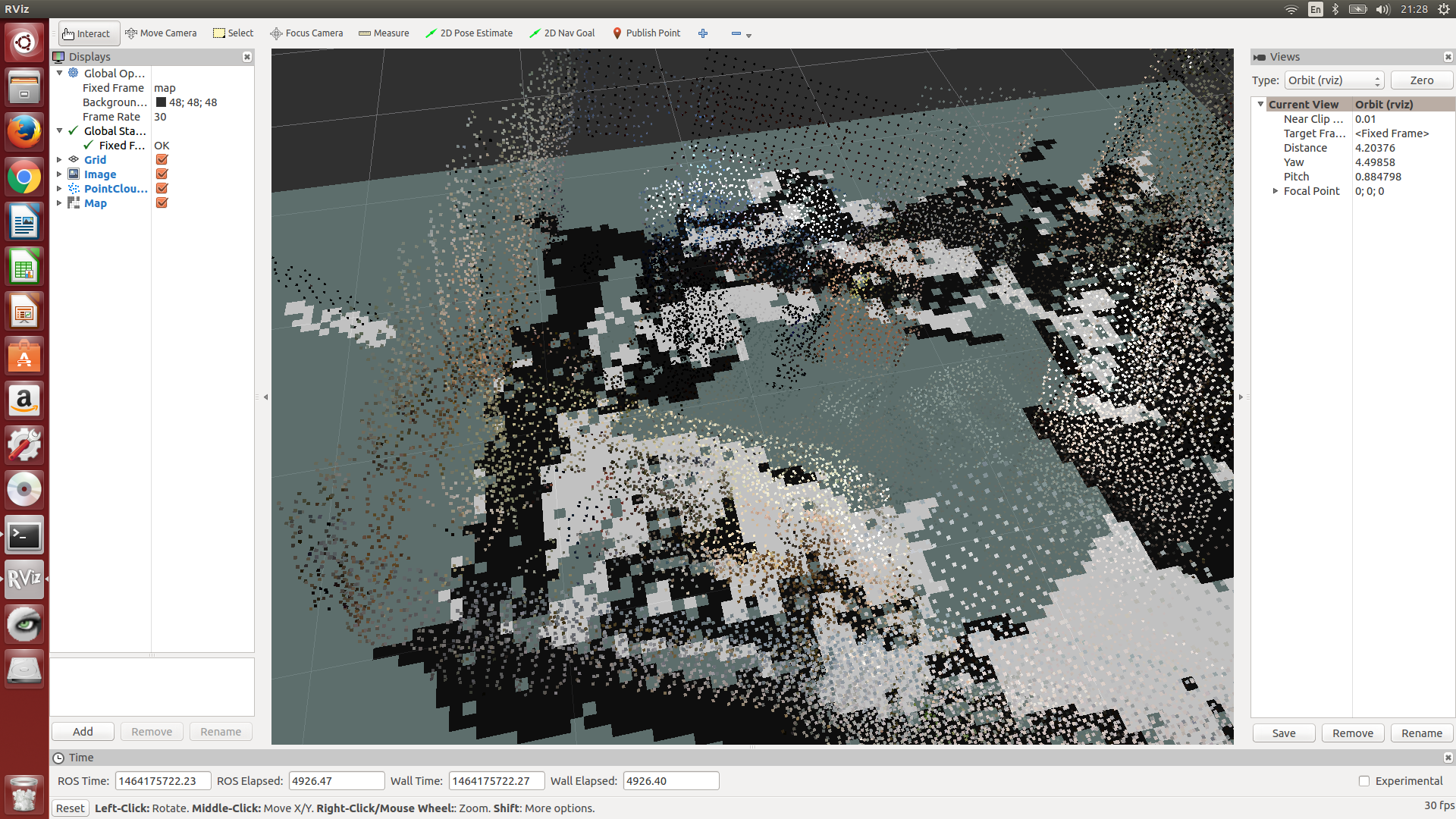
sudo apt-get install ros-indigo-rtabmap-ros. I have since gotten rtabmap/projmap results on rviz. I ran rtabmap without "--Vis/MaxFeatures" or any of the other parameters except rtabmapviz=false and delete_db_on_start.
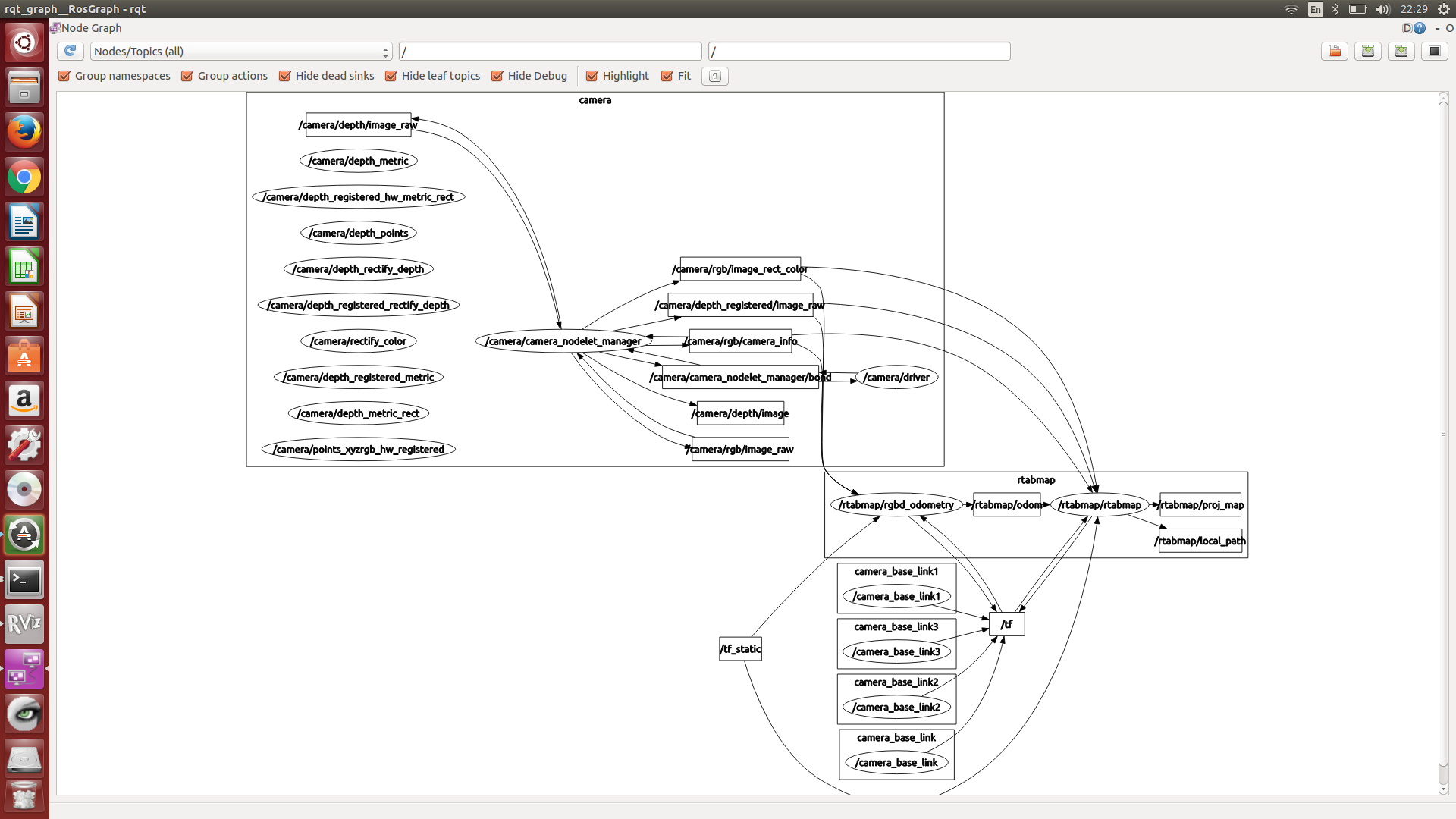
It's a bit hard to see under the point cloud but it seems to be working as intended. The bottom picture is the updated output of rqt_graph.
While this does look like what I need, I'm still curious as to why this doesn't run on rtabmapviz and why the parameters aren't being recognized. Am I meant to install it from source as well as the ros wrapper?
Thanks so much for your help so far.
| Free forum by Nabble | Edit this page |