Re: RGB-D Mapping with Laser scanner
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p144.html
You don't have to change anything in Freenect launch files. For the lines you mentioned, it should look like like that with Freenect:
Don't forget to start freenect.launch with "depth_registration:=true" argument. Verify that these topics are sent:
The base frame id may be needed to be modified. The actual is set to "base_footprint". Don't need the "use_sim_time" too and the "image_transport" parameters. You should set "/jn0/base_can" to "/scan" (with '/') for rtabmap node.
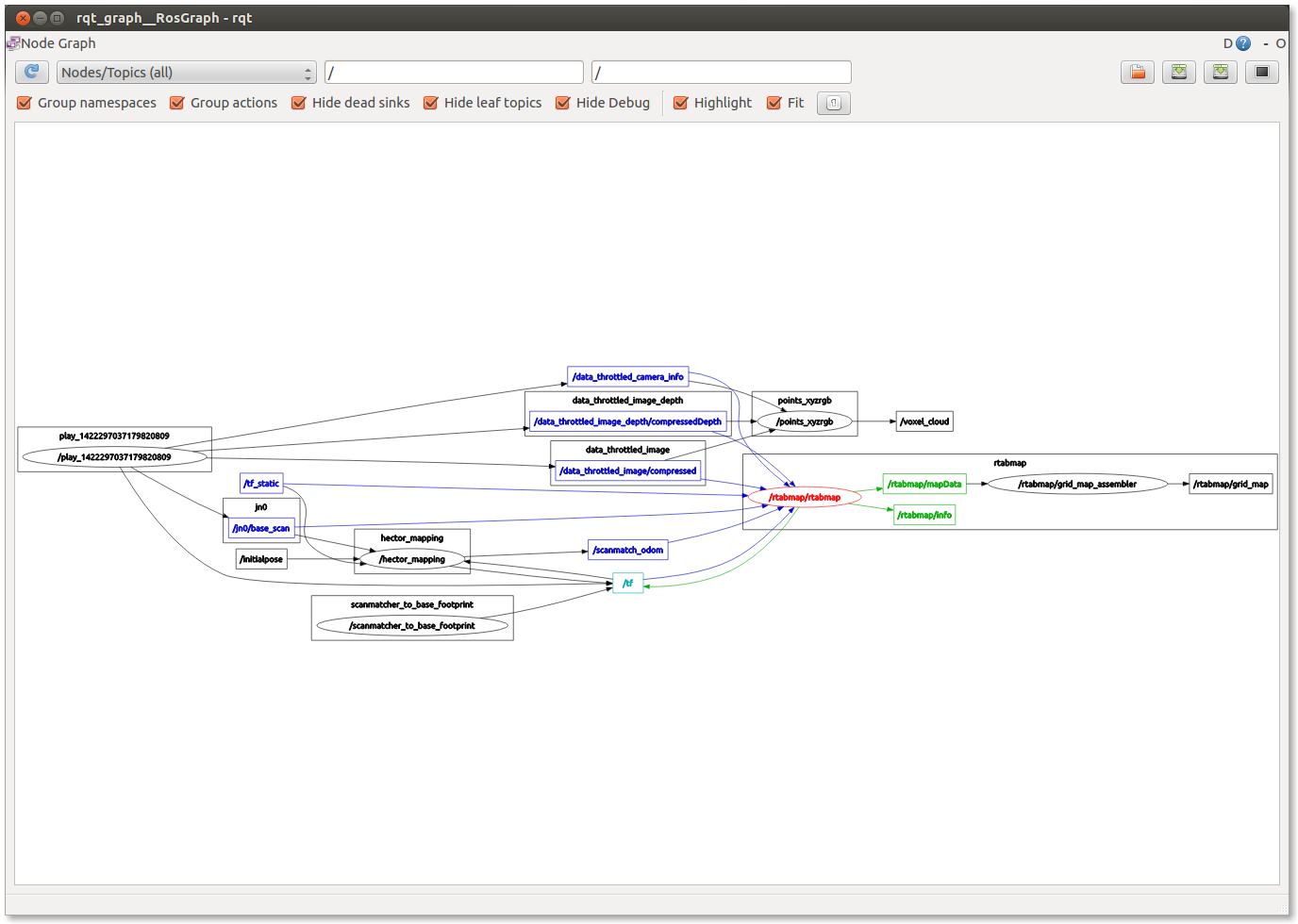
The "/map" frame is only published after the first image is processed by rtabmap, so the inputs should be correctly set. Here the actual rqt_graph of the demo above:
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p144.html
You don't have to change anything in Freenect launch files. For the lines you mentioned, it should look like like that with Freenect:
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/> <remap from="depth/image" to="/camera/depth_registered/image_raw"/> <remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
Don't forget to start freenect.launch with "depth_registration:=true" argument. Verify that these topics are sent:
$ roslaunch freenect_launch freenect.launch depth_registration:=true $ rostopic hz /camera/rgb/image_rect_color $ rostopic hz /camera/depth_registered/image_raw $ rostopic hz /camera/depth_registered/camera_info
The base frame id may be needed to be modified. The actual is set to "base_footprint". Don't need the "use_sim_time" too and the "image_transport" parameters. You should set "/jn0/base_can" to "/scan" (with '/') for rtabmap node.
The "/map" frame is only published after the first image is processed by rtabmap, so the inputs should be correctly set. Here the actual rqt_graph of the demo above:
| Free forum by Nabble | Edit this page |