Re: Load old database to do localization
Posted by dizeng on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Load-old-database-to-do-localization-tp1474p1494.html
--
URL: http://official-rtab-map-forum.206.s1.nabble.com/Load-old-database-to-do-localization-tp1474p1494.html
Hey Mathieu
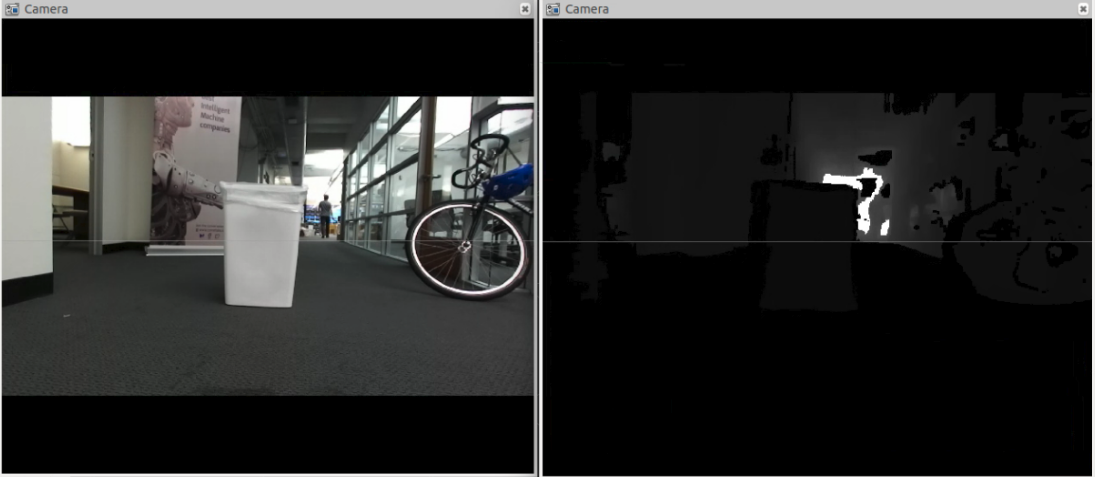
Here is a image of RBGD, what do you think about the quality of the depth?
On Thu, Jun 23, 2016 at 10:34 PM, Di Zeng <[hidden email]> wrote:
The point cloud is calculated from rtabmap, Zed is using Quality mode.Seems like the filtering is doing very good job in costmap.I should try using the same parameters but use the stereo mode to see if the point cloud is doing better job.Is there a way to make the mapping less sensitive to the dynamic obstacle? Now if a person stands in front of camera, even after he moves, the person gets mapped.
Best Regards
Di Zeng
Transcend Robotics - Robotics Engineer
Phone: 301-222-7046
| Free forum by Nabble | Edit this page |