Problem with Navigation
Posted by Mercedes on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problem-with-Navigation-tp1559.html
Hello, we are using Rtab with a ZED stereo camera and zed-wrapper in a Jetson TK1.
Now we have Stereo Outdoor Mapping running well and we want to run Navigation but we have problems. In
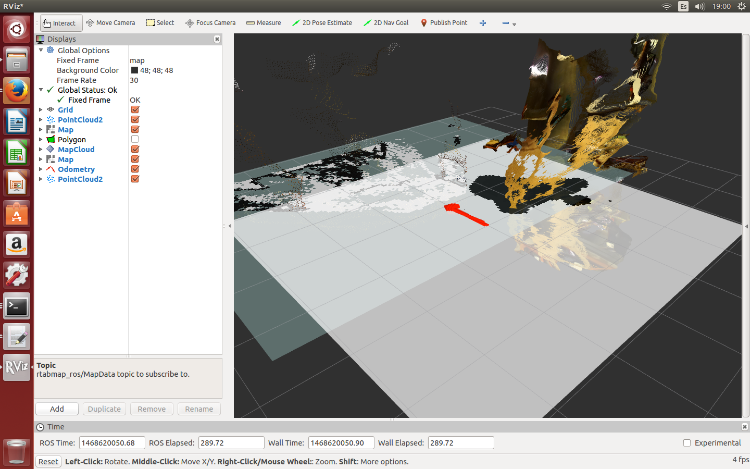
RViz local costmap show in other
Local costmap use cloud vertical points not in the same plane of proj_map generated by RTAB.
We attach a picture and launch files.
If you only run Stereo Outdoor Navigation, we move the robot and generates the correct proj_map.
Somebody know why costmap is in a plane different than proj_map?
Thank you very much,
Mercedes
rtabmap.zip
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problem-with-Navigation-tp1559.html
Hello, we are using Rtab with a ZED stereo camera and zed-wrapper in a Jetson TK1.
Now we have Stereo Outdoor Mapping running well and we want to run Navigation but we have problems. In
RViz local costmap show in other
Local costmap use cloud vertical points not in the same plane of proj_map generated by RTAB.
We attach a picture and launch files.
If you only run Stereo Outdoor Navigation, we move the robot and generates the correct proj_map.
Somebody know why costmap is in a plane different than proj_map?
Thank you very much,
Mercedes
rtabmap.zip
| Free forum by Nabble | Edit this page |