Re: Opencv SURF
Posted by daniels on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Opencv-SURF-tp1554p1566.html
Thanks Mat,
i reinstall again opencv, with the steps for rtabslam standalone. think dont work well and I'm trying again. But nonfree version is being recognized, without being able to select the SURF choice in the GUI.
The find_object finally works whit SURF and SIFT doing catkin_make whit both, but do not know if the rtabslam_ros version works. adding the following commands to rgbd_mapping.launch attempt to calibrate this option.
param name="Kp/DetectorStrategy" type="string" value="0"
param name = "SURF / HessianThreshold" type = "string" value = "600"
param name = "Vis / MaxDepth" type = "string" value = "12"
param name = "Vis / MinInliers" type = "string" value = "10"
param name = "Vis / InlierDistance" type = "string" value = "0.05"
the "Vis" line sends an error.
there any way to ensure that the ros_version is using SURF??. according to what I read from you on another thread, without setting ros_version works with ORB as find_object and standalone.
thanks, I really appreciate your help.
new attempt:
[ WARN] (2016-07-16 23:01:18.227) Features2d.cpp:425::create() SURF/SIFT features cannot be used because OpenCV was not built with nonfree module. ORB is used instead.
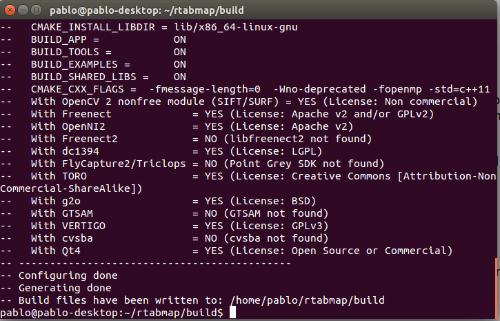
manually remove the build folder in both cases (ros and standalone), as the file CMakeCache.txt whit the extra step
$ cd rtabmap/build
$ cmake .. [<---double dots included]
$ make -j4
$ sudo make install
I assume that as find_objects is recognizing the function, the problem must be in the standalone version.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Opencv-SURF-tp1554p1566.html
Thanks Mat,
i reinstall again opencv, with the steps for rtabslam standalone. think dont work well and I'm trying again. But nonfree version is being recognized, without being able to select the SURF choice in the GUI.
The find_object finally works whit SURF and SIFT doing catkin_make whit both, but do not know if the rtabslam_ros version works. adding the following commands to rgbd_mapping.launch attempt to calibrate this option.
param name="Kp/DetectorStrategy" type="string" value="0"
param name = "SURF / HessianThreshold" type = "string" value = "600"
param name = "Vis / MaxDepth" type = "string" value = "12"
param name = "Vis / MinInliers" type = "string" value = "10"
param name = "Vis / InlierDistance" type = "string" value = "0.05"
the "Vis" line sends an error.
there any way to ensure that the ros_version is using SURF??. according to what I read from you on another thread, without setting ros_version works with ORB as find_object and standalone.
thanks, I really appreciate your help.
new attempt:
[ WARN] (2016-07-16 23:01:18.227) Features2d.cpp:425::create() SURF/SIFT features cannot be used because OpenCV was not built with nonfree module. ORB is used instead.
manually remove the build folder in both cases (ros and standalone), as the file CMakeCache.txt whit the extra step
$ cd rtabmap/build
$ cmake .. [<---double dots included]
$ make -j4
$ sudo make install
I assume that as find_objects is recognizing the function, the problem must be in the standalone version.
| Free forum by Nabble | Edit this page |