Re: rtabmap_ros produce cloud_map error
Posted by mantouRobot on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-produce-cloud-map-error-tp1615p1623.html
Hi, thank u for reply~
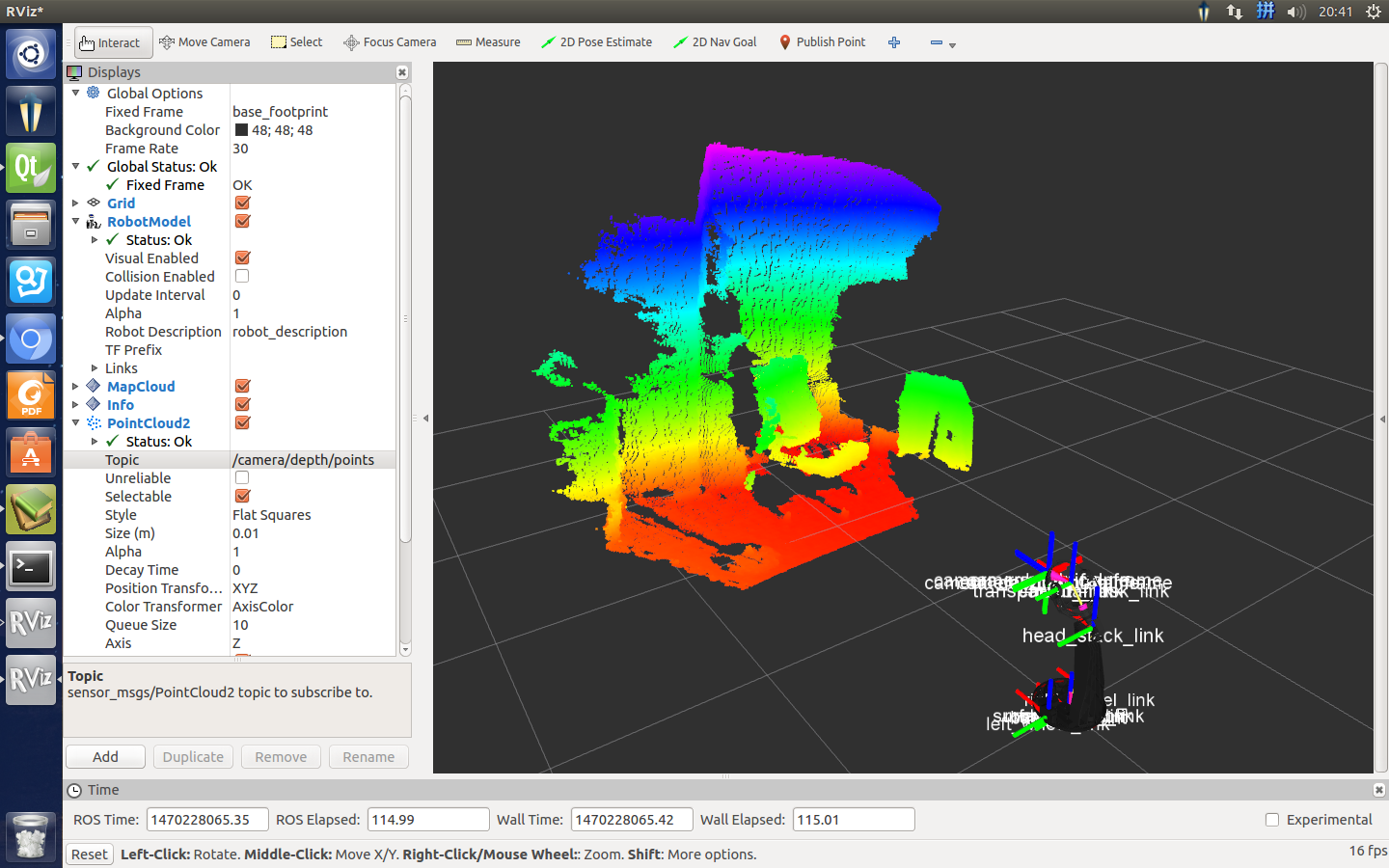
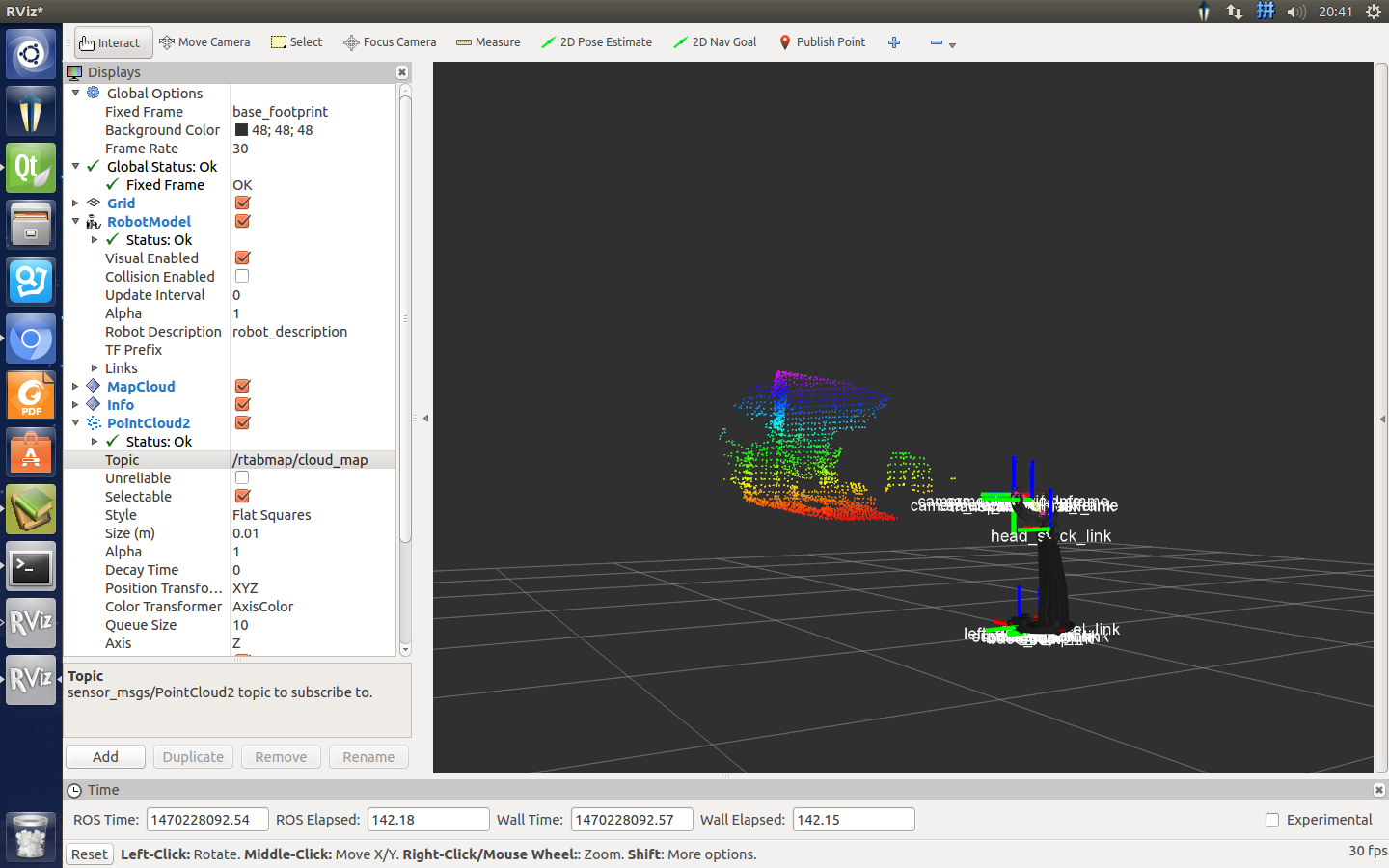
i am using rtabmap_ros on a robot, the robot gives the "/odom", "tf", "image", "depth_image", "camera_info" to the node of rtabmap in the mapping method, but a little difference of this robot with other robot like turtlebot, its rgb camera and depth camera is separated and them not in the same height. i have calibrated the cameras, the result applyed to the tf and camera info. but the cloud_map's groud in the air...
The "frame_id" is base_footprint, the AlignWithGround is new parameter not in the indigo? i have no ideas...
Can u give me any ideas? thanks a lot~
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-produce-cloud-map-error-tp1615p1623.html
Hi, thank u for reply~
i am using rtabmap_ros on a robot, the robot gives the "/odom", "tf", "image", "depth_image", "camera_info" to the node of rtabmap in the mapping method, but a little difference of this robot with other robot like turtlebot, its rgb camera and depth camera is separated and them not in the same height. i have calibrated the cameras, the result applyed to the tf and camera info. but the cloud_map's groud in the air...
The "frame_id" is base_footprint, the AlignWithGround is new parameter not in the indigo? i have no ideas...
Can u give me any ideas? thanks a lot~
| Free forum by Nabble | Edit this page |