Re: Could not get transform from odom to camera_depth_optical_frame, RTAB Realsense R200 Issue
Posted by Gabe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Could-not-get-transform-from-odom-to-camera-depth-optical-frame-RTAB-Realsense-R200-Issue-tp1616p1632.html
Hi Matlabbe,
Thanks for the response. Here is what I did:
Started playing the bag file (with rosparam set use_sim_time true and the --clock option in the rosbag play), and this is the resilt of tf view_frames:
http://docdro.id/RGFT6Np
Tf tree seems normal.
Ran the following code:
Then ran tf view_frames again:
http://docdro.id/zt6WUNr
Also seems normal.
Here is the rqt_graph:
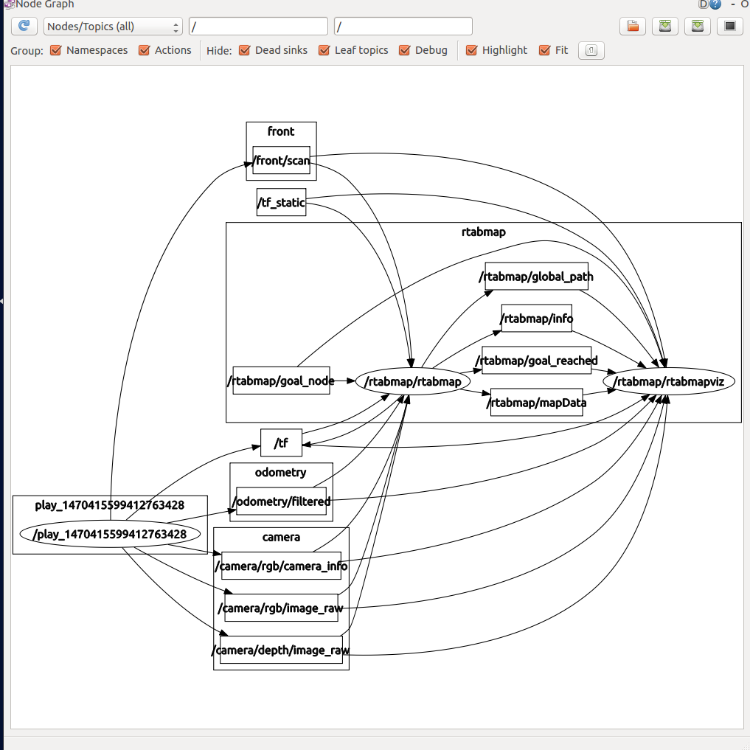
- I did not change the fixed frame parameter on my line above, so the fixed frame should be base_link and it does seem like it when viewing the RTAB map being generated.
- My /camera/depth/image_raw is not registered with the color image. Does it need to be?
- Ok, removed the compressed:=true.
Let me know how I might be able to fix this, the main problem is that RTAB thinks that the robot is moving all over the place but it is just moving in a straight line. Seems like an issue with the tf. I checked the /odometry/filtered topic, and the poses of the robot seem normal, no sudden jumps like those seen in RTAB.
Let me know if there is any solution to this, thanks!
Best,
Gabriel
And
URL: http://official-rtab-map-forum.206.s1.nabble.com/Could-not-get-transform-from-odom-to-camera-depth-optical-frame-RTAB-Realsense-R200-Issue-tp1616p1632.html
Hi Matlabbe,
Thanks for the response. Here is what I did:
Started playing the bag file (with rosparam set use_sim_time true and the --clock option in the rosbag play), and this is the resilt of tf view_frames:
http://docdro.id/RGFT6Np
Tf tree seems normal.
Ran the following code:
roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" odom:=/odometry/filtered rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info queue_size:=10 RGBD/AngularUpdate:=0.01 RGBD/LinearUpdate:=0.01 Rtabmap/TimeThr:=700 Mem/RehearsalSimilarity:=0.45 RGBD/OptimizeFromGraphEnd:=true visual_odometry:=false odom_topic:=/odometry/filtered rtabmapviz:=true rviz:=false subscribe_scan:=true scan_topic:=/front/scan
Then ran tf view_frames again:
http://docdro.id/zt6WUNr
Also seems normal.
Here is the rqt_graph:
- I did not change the fixed frame parameter on my line above, so the fixed frame should be base_link and it does seem like it when viewing the RTAB map being generated.
- My /camera/depth/image_raw is not registered with the color image. Does it need to be?
- Ok, removed the compressed:=true.
Let me know how I might be able to fix this, the main problem is that RTAB thinks that the robot is moving all over the place but it is just moving in a straight line. Seems like an issue with the tf. I checked the /odometry/filtered topic, and the poses of the robot seem normal, no sudden jumps like those seen in RTAB.
Let me know if there is any solution to this, thanks!
Best,
Gabriel
And
| Free forum by Nabble | Edit this page |