Re: Could not get transform from odom to camera_depth_optical_frame, RTAB Realsense R200 Issue
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Could-not-get-transform-from-odom-to-camera-depth-optical-frame-RTAB-Realsense-R200-Issue-tp1616p1651.html
Hi Gabe,
There is something wrong with the odometry. If you open the database in rtabmap-databaseViewer, you can look at the neighbor links in the Constraints view. These are odometry transforms, and they have a lot of errors. Example:
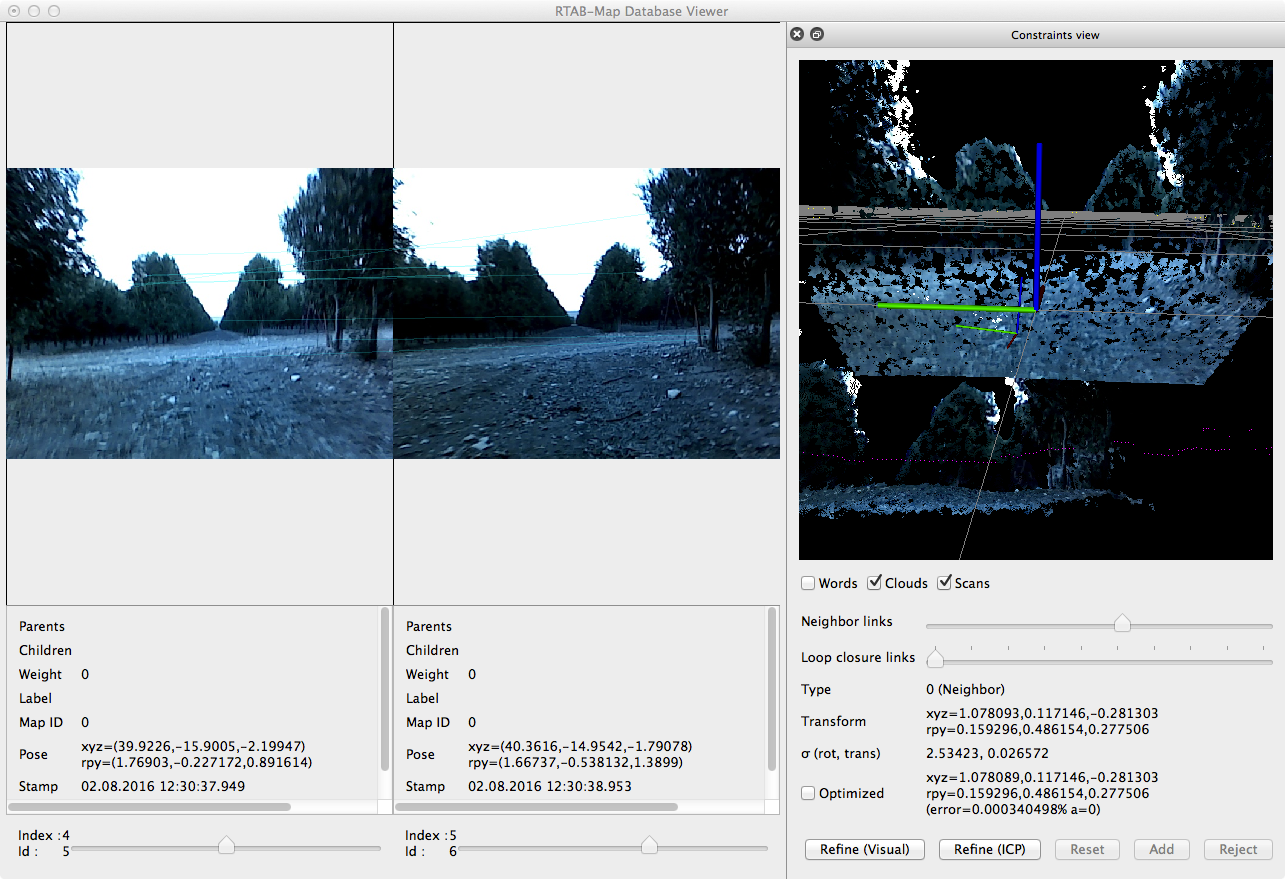
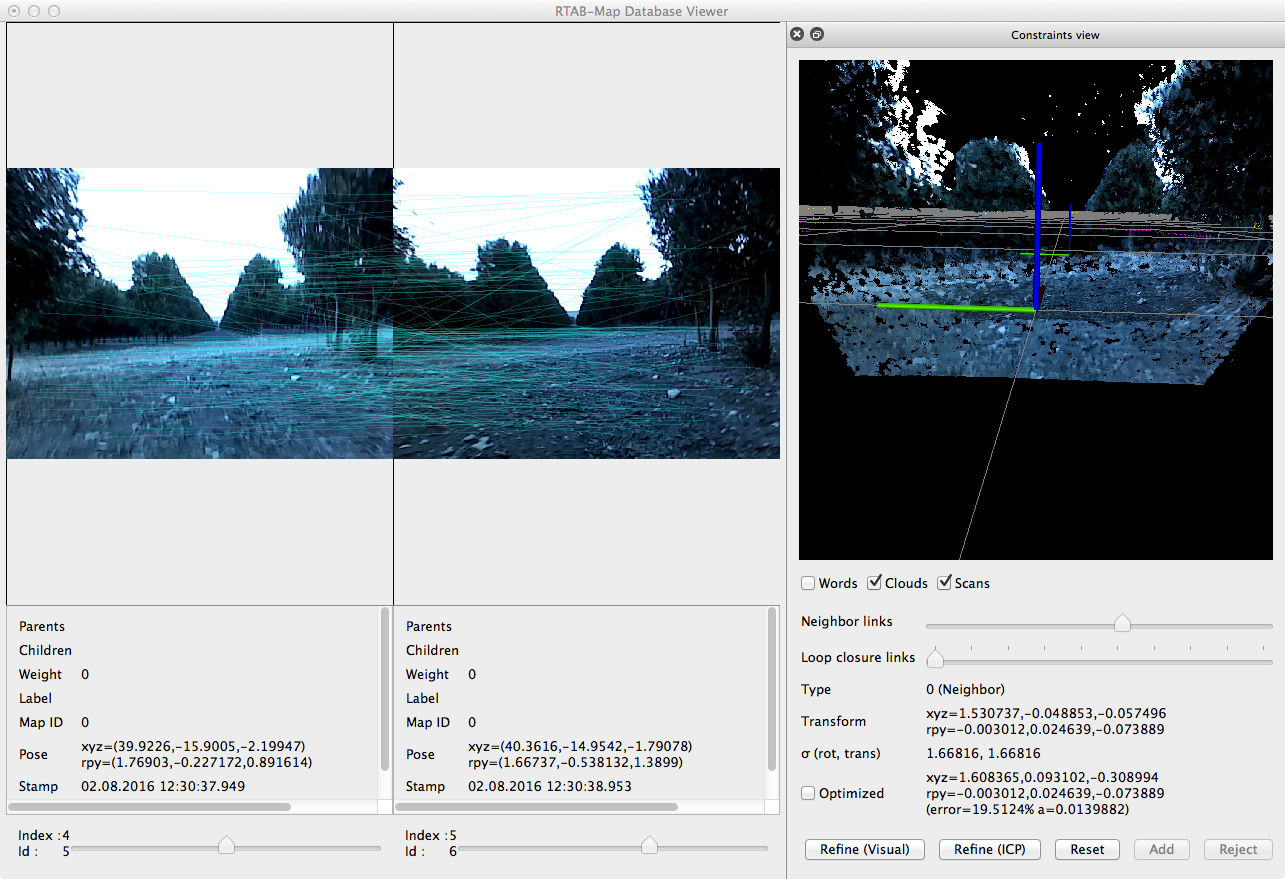
If I refine manually the transform by recomputing visual correspndences, I can get something better (you can see the next frame referential is just in front of the previous one):
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/Could-not-get-transform-from-odom-to-camera-depth-optical-frame-RTAB-Realsense-R200-Issue-tp1616p1651.html
Hi Gabe,
There is something wrong with the odometry. If you open the database in rtabmap-databaseViewer, you can look at the neighbor links in the Constraints view. These are odometry transforms, and they have a lot of errors. Example:
If I refine manually the transform by recomputing visual correspndences, I can get something better (you can see the next frame referential is just in front of the previous one):
cheers
| Free forum by Nabble | Edit this page |