RTAB-Map not working with subscribe_scan
Posted by b.emery94 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-not-working-with-subscribe-scan-tp1844.html
Hi Mathieu,
I'm currently trying to run RTAB-Map by passing in wheel odometry and correcting it with 2d a hokuyo 2D laser scanner within RTAB-Map. However, when I set the parameter subscribe_scan to true, the occupancy grid doesn't get published and the pose does not get properly updated. When I use the exact same settings with subscribe_scan set to false everything works as expected.
This is my launch file:
https://gist.github.com/anonymous/878c52597f6e1209be2e8afc21461660
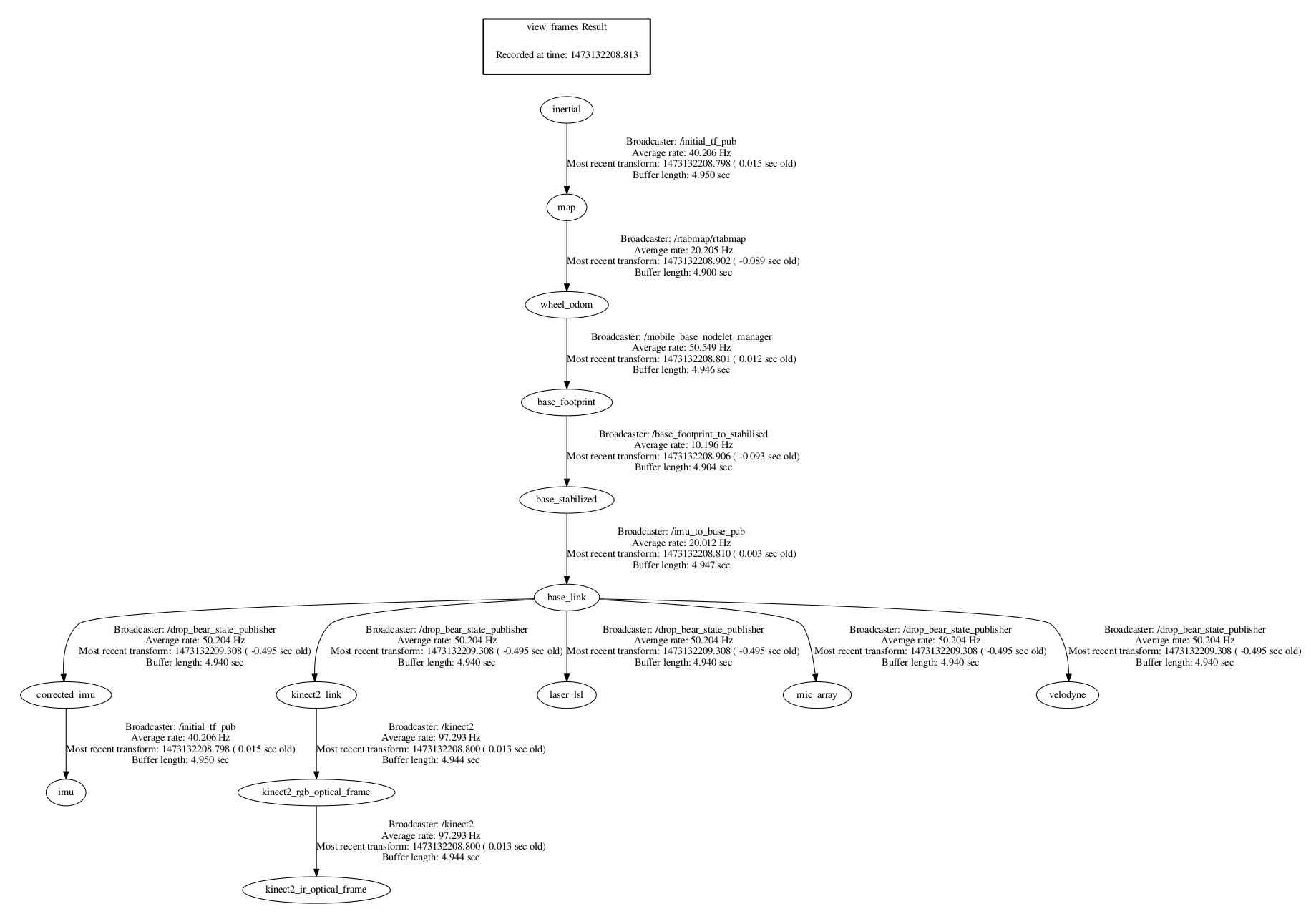
When subscribe_scan is true, the TF tree is completed, however the transform published by rtab-map between wheel_odom and map is static with no translation and rotation. TF tree is here:
The laser scan appears to be subscribed to by rtab-map so it's not an issue with remapping the topic name:
$ rostopic info /scan_lsl
Type: sensor_msgs/LaserScan
Publishers:
* /urg_node_horizontal (http://brendan-robot:36177/)
Subscribers:
* /rtabmap/rtabmap (http://brendan-robot:49783/)
I also tried it with your exact launch file (with adjusted frames/topics) from the tutorial page, “Setup RTAB-Map on Your Robot!” under the “Kinect + Odometry + 2D laser” with the same result i.e. works with subscribe_scan off and doesn't work with subscribe_scan on.
Do you have any ideas what the issue could be?
Thanks in advance for the help!
Brendan
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-not-working-with-subscribe-scan-tp1844.html
Hi Mathieu,
I'm currently trying to run RTAB-Map by passing in wheel odometry and correcting it with 2d a hokuyo 2D laser scanner within RTAB-Map. However, when I set the parameter subscribe_scan to true, the occupancy grid doesn't get published and the pose does not get properly updated. When I use the exact same settings with subscribe_scan set to false everything works as expected.
This is my launch file:
https://gist.github.com/anonymous/878c52597f6e1209be2e8afc21461660
When subscribe_scan is true, the TF tree is completed, however the transform published by rtab-map between wheel_odom and map is static with no translation and rotation. TF tree is here:
The laser scan appears to be subscribed to by rtab-map so it's not an issue with remapping the topic name:
$ rostopic info /scan_lsl
Type: sensor_msgs/LaserScan
Publishers:
* /urg_node_horizontal (http://brendan-robot:36177/)
Subscribers:
* /rtabmap/rtabmap (http://brendan-robot:49783/)
I also tried it with your exact launch file (with adjusted frames/topics) from the tutorial page, “Setup RTAB-Map on Your Robot!” under the “Kinect + Odometry + 2D laser” with the same result i.e. works with subscribe_scan off and doesn't work with subscribe_scan on.
Do you have any ideas what the issue could be?
Thanks in advance for the help!
Brendan
| Free forum by Nabble | Edit this page |