Re: Error when trying to run Rtabmap version ROS
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-trying-to-run-Rtabmap-version-ROS-tp179p187.html
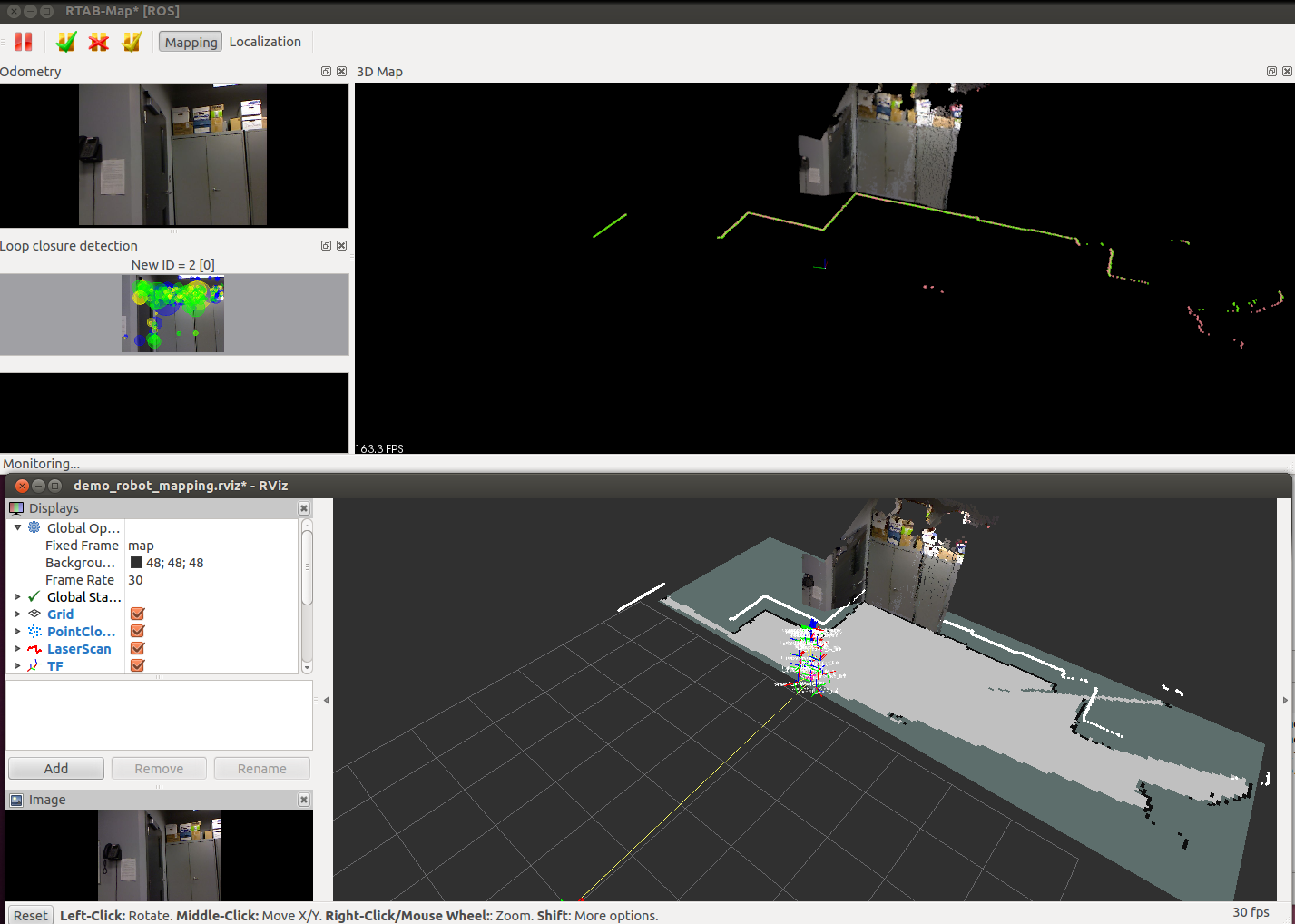
The robot demo has some TF warnings at the beginning, but the map begins to be updated about 2 seconds after the rosbag is started.
Here the terminal output that you would have when all is okay:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-trying-to-run-Rtabmap-version-ROS-tp179p187.html
The robot demo has some TF warnings at the beginning, but the map begins to be updated about 2 seconds after the rosbag is started.
Here the terminal output that you would have when all is okay:
~$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=true
~$ rosbag play --clock demo_mapping.bag
SUMMARY
========
PARAMETERS
* /points_xyzrgb/depth/image_transport
* /points_xyzrgb/queue_size
* /points_xyzrgb/rgb/image_transport
* /points_xyzrgb/voxel_size
* /rosdistro
* /rosversion
* /rtabmap/rtabmap/LccBow/InlierDistance
* /rtabmap/rtabmap/LccBow/MaxDepth
* /rtabmap/rtabmap/LccIcp/Type
* /rtabmap/rtabmap/RGBD/LocalLoopDetectionSpace
* /rtabmap/rtabmap/RGBD/LocalLoopDetectionTime
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd
* /rtabmap/rtabmap/RGBD/PoseScanMatching
* /rtabmap/rtabmap/depth/image_transport
* /rtabmap/rtabmap/frame_id
* /rtabmap/rtabmap/rgb/image_transport
* /rtabmap/rtabmap/subscribe_depth
* /rtabmap/rtabmap/subscribe_laserScan
* /rtabmap/rtabmap/wait_for_transform
* /rtabmap/rtabmapviz/depth/image_transport
* /rtabmap/rtabmapviz/frame_id
* /rtabmap/rtabmapviz/rgb/image_transport
* /rtabmap/rtabmapviz/subscribe_depth
* /rtabmap/rtabmapviz/subscribe_laserScan
* /rtabmap/rtabmapviz/wait_for_transform
* /use_sim_time
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
/
points_xyzrgb (nodelet/nodelet)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [7066]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 1fb7c5ac-b23c-11e4-b708-c42c030ca39d
process[rosout-1]: started with pid [7079]
started core service [/rosout]
process[rtabmap/rtabmap-2]: started with pid [7093]
[ INFO] [1423693204.389619190]: Starting node...
[ INFO] [1423693204.416343189]: rtabmap: frame_id = base_footprint
[ INFO] [1423693204.416458828]: rtabmap: map_frame_id = map
[ INFO] [1423693204.416503714]: rtabmap: queue_size = 10
[ INFO] [1423693204.416556890]: rtabmap: tf_delay = 0.050000
process[rtabmap/rtabmapviz-3]: started with pid [7174]
[ INFO] [1423693204.520981276]: Setting RTAB-Map parameter "LccBow/InlierDistance"="0.1"
[ INFO] [1423693204.536834937]: Setting RTAB-Map parameter "LccBow/MaxDepth"="0.0"
[ INFO] [1423693204.544805422]: Setting RTAB-Map parameter "LccIcp/Type"="2"
[ INFO] [1423693204.730406761]: Setting RTAB-Map parameter "RGBD/LocalLoopDetectionSpace"="true"
[ INFO] [1423693204.732758833]: Setting RTAB-Map parameter "RGBD/LocalLoopDetectionTime"="false"
[ INFO] [1423693204.741678079]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false"
[ INFO] [1423693204.742888188]: Setting RTAB-Map parameter "RGBD/PoseScanMatching"="true"
[ INFO] [1423693204.796300847]: Starting node...
process[rviz-4]: started with pid [7780]
[ INFO] [1423693204.938134174]: rtabmapviz: Using configuration from "/home/mathieu/catkin_ws/src/rtabmap_ros/launch/config/rgbd_gui.ini"
[ INFO] [1423693205.035364975]: rviz version 1.10.18
[ INFO] [1423693205.035605599]: compiled against OGRE version 1.7.4 (Cthugha)
[ INFO] [1423693205.055279832]: RTAB-Map rate detection = 1.000000 Hz
[ INFO] [1423693205.055765545]: rtabmap: Deleted database "/home/mathieu/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1423693205.055808413]: rtabmap: Using database from "/home/mathieu/.ros/rtabmap.db".
process[points_xyzrgb-5]: started with pid [7972]
[ INFO] [1423693205.906828784]: Reading parameters from the ROS server...
[ INFO] [1423693206.037116867]: Registering Depth+LaserScan callback...
[ INFO] [1423693206.041187248]: rtabmap started...
[ INFO] [1423693206.083981066]: Parameters read = 160
[ INFO] [1423693206.084054883]: Parameters successfully read.
[ INFO] [1423693206.203484915]: Stereo is NOT SUPPORTED
[ INFO] [1423693206.204054653]: OpenGl version: 3.3 (GLSL 3.3).
[ INFO] [1423693206.614110394]: Registering Depth+LaserScan callback...
[ INFO] [1423693206.617096499]: rtabmapviz started.
[ WARN] [1423693209.182179169, 1368730003.599447640]: Lookup would require extrapolation into the past. Requested time 1368730003.421742750 but the earliest data is at time 1368730003.905609120, when looking up transform from frame [base_laser_link] to frame [base_footprint]
[ WARN] [1423693209.286916918, 1368730003.700114500]: Lookup would require extrapolation into the past. Requested time 1368730003.521858750 but the earliest data is at time 1368730003.905609120, when looking up transform from frame [base_laser_link] to frame [base_footprint]
[ WARN] [1423693209.380553388, 1368730003.790721729]: Lookup would require extrapolation into the past. Requested time 1368730003.596578750 but the earliest data is at time 1368730003.905609120, when looking up transform from frame [base_laser_link] to frame [base_footprint]
[ WARN] [1423693209.544798230, 1368730003.963490470]: Lookup would require extrapolation into the past. Requested time 1368730003.721525750 but the earliest data is at time 1368730003.905609120, when looking up transform from frame [base_laser_link] to frame [base_footprint]
[ WARN] [1423693209.572062305, 1368730003.983649832]: Lookup would require extrapolation into the past. Requested time 1368730003.871489750 but the earliest data is at time 1368730003.905609120, when looking up transform from frame [base_laser_link] to frame [base_footprint]
[ WARN] [1423693210.164091833, 1368730004.582778418]: Could not get transform from base_footprint to base_laser_link after 1 second!
[ WARN] [1423693211.176205244, 1368730005.592633767]: Could not get transform from base_footprint to base_laser_link after 1 second!
[ WARN] [1423693211.238846917, 1368730005.653262976]: Use depth image with "unsigned short" type to avoid conversion. This message is only printed once...
[ INFO] [1423693211.506321189, 1368730005.824959342]: rtabmap: Update rate=1.000000s, Limit=0.000000s, RTAB-Map=0.265444s, Publish=0.003623s (1 local nodes)
[ INFO] [1423693215.768482657, 1368730006.908974108]: rtabmap: Update rate=1.000000s, Limit=0.000000s, RTAB-Map=0.268008s, Publish=0.003576s (2 local nodes)
...
The last INFO messages (last two lines) shown at 1 Hz are sent when rtabmap is actually mapping.
| Free forum by Nabble | Edit this page |