Re: RGB-D Mapping with Laser scanner
Posted by consoante on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p1873.html
I think I am making progress: both datasets are visible and I see the hector_slam map being built in rviz.
When I try to run rtabmapviz I am getting an error and the window does not appear...Any advice?
Is it better to record a bag and process it afterwards?
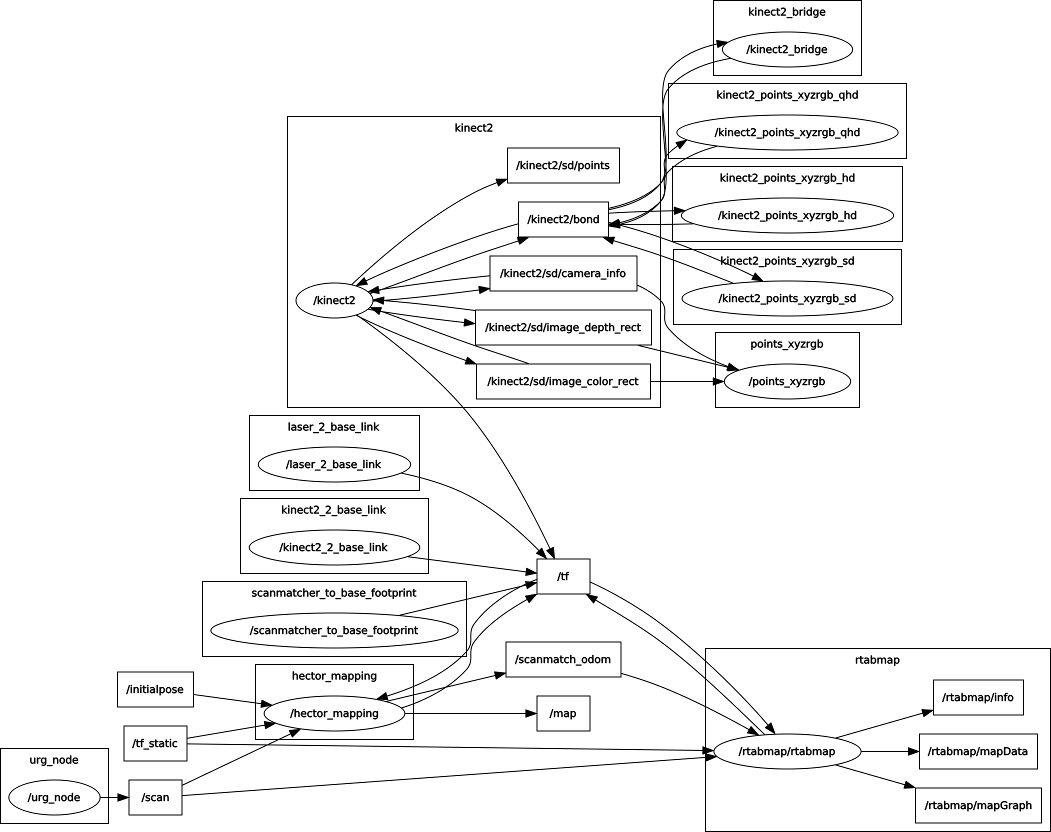
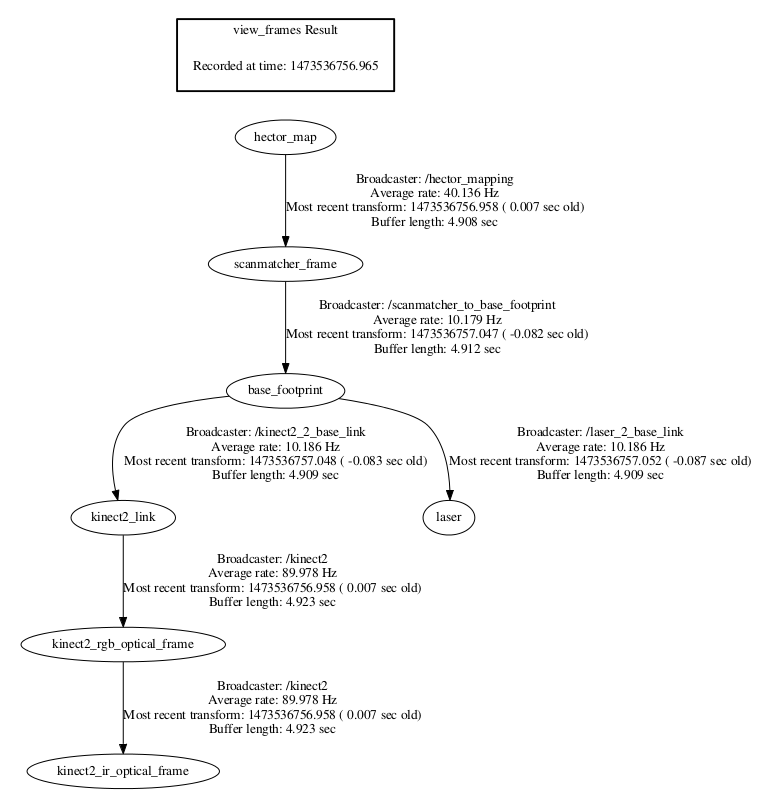
My graph and tf frames are bellow for reference and so is my error in rtabmapviz
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p1873.html
I think I am making progress: both datasets are visible and I see the hector_slam map being built in rviz.
When I try to run rtabmapviz I am getting an error and the window does not appear...Any advice?
Is it better to record a bag and process it afterwards?
My graph and tf frames are bellow for reference and so is my error in rtabmapviz
Many thanks againconsoante wroteChecking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ThinkPad-T440p:54374/
SUMMARY
========
PARAMETERS
* /hector_mapping/base_frame: base_footprint
* /hector_mapping/map_frame: hector_map
* /hector_mapping/map_multi_res_levels: 2
* /hector_mapping/map_resolution: 0.05
* /hector_mapping/map_size: 2048
* /hector_mapping/map_update_angle_thresh: 0.06
* /hector_mapping/odom_frame: odom
* /hector_mapping/pub_map_odom_transform: False
* /hector_mapping/pub_map_scanmatch_transform: True
* /hector_mapping/pub_odometry: True
* /hector_mapping/scan_topic: /scan
* /points_xyzrgb/voxel_size: 0.01
* /rosdistro: indigo
* /rosversion: 1.11.20
* /rtabmap/rtabmap/Optimizer/Slam2D: true
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Vis/InlierDistance: 0.1
* /rtabmap/rtabmap/Vis/MaxDepth: 10.0
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmapviz/frame_id: base_footprint
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_laserScan: True
* /urg_node/ip_address: 192.168.0.10
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
/
hector_mapping (hector_mapping/hector_mapping)
kinect2_2_base_link (tf/static_transform_publisher)
laser_2_base_link (tf/static_transform_publisher)
points_xyzrgb (nodelet/nodelet)
scanmatcher_to_base_footprint (tf/static_transform_publisher)
urg_node (urg_node/urg_node)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[urg_node-1]: started with pid [13483]
process[kinect2_2_base_link-2]: started with pid [13484]
process[laser_2_base_link-3]: started with pid [13485]
process[scanmatcher_to_base_footprint-4]: started with pid [13493]
process[hector_mapping-5]: started with pid [13503]
process[rtabmap/rtabmap-6]: started with pid [13528]
process[rtabmap/rtabmapviz-7]: started with pid [13533]
process[points_xyzrgb-8]: started with pid [13545]
HectorSM map lvl 0: cellLength: 0.05 res x:2048 res y: 2048
HectorSM map lvl 1: cellLength: 0.1 res x:1024 res y: 1024
[ INFO] [1473536958.202990687]: HectorSM p_base_frame_: base_footprint
[ INFO] [1473536958.203072087]: HectorSM p_map_frame_: hector_map
[ INFO] [1473536958.203099437]: HectorSM p_odom_frame_: odom
[ INFO] [1473536958.203127054]: HectorSM p_scan_topic_: /scan
[ INFO] [1473536958.203156302]: HectorSM p_use_tf_scan_transformation_: true
[ INFO] [1473536958.203181625]: HectorSM p_pub_map_odom_transform_: false
[ INFO] [1473536958.203219208]: HectorSM p_scan_subscriber_queue_size_: 5
[ INFO] [1473536958.203259972]: HectorSM p_map_pub_period_: 2.000000
[ INFO] [1473536958.203283108]: HectorSM p_update_factor_free_: 0.400000
[ INFO] [1473536958.203305883]: HectorSM p_update_factor_occupied_: 0.900000
[ INFO] [1473536958.203328951]: HectorSM p_map_update_distance_threshold_: 0.400000
[ INFO] [1473536958.203351503]: HectorSM p_map_update_angle_threshold_: 0.060000
[ INFO] [1473536958.203372769]: HectorSM p_laser_z_min_value_: -1.000000
[ INFO] [1473536958.203394604]: HectorSM p_laser_z_max_value_: 1.000000
[ INFO] [1473536958.314057716]: Starting node...
[ INFO] [1473536958.351224953]: Starting node...
[ INFO] [1473536958.373440533]: rtabmapviz: Using configuration from "/opt/ros/indigo/share/rtabmap_ros/launch/config/rgbd_gui.ini"
[ INFO] [1473536958.386297790]: rtabmap: frame_id = base_footprint
[ INFO] [1473536958.386335200]: rtabmap: map_frame_id = map
[ INFO] [1473536958.386345369]: rtabmap: queue_size = 10
[ INFO] [1473536958.386356496]: rtabmap: tf_delay = 0.050000
[ INFO] [1473536958.386366020]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1473536958.386374780]: rtabmap: depth_cameras = 1
[ INFO] [1473536958.386384101]: rtabmap: approx_sync = true
[ INFO] [1473536958.597805405]: Setting RTAB-Map parameter "Optimizer/Slam2D"="true"
[ INFO] [1473536958.646841753]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1473536958.647350898]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1473536958.752345851]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.1"
[ INFO] [1473536958.754747810]: Setting RTAB-Map parameter "Vis/MaxDepth"="10.0"
[ INFO] [1473536958.931730056]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1473536958.931823355]: rtabmap: Deleted database "/root/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1473536958.931840624]: rtabmap: Using database from "/root/.ros/rtabmap.db".
[rtabmap/rtabmapviz-7] process has died [pid 13533, exit code -11, cmd /opt/ros/indigo/lib/rtabmap_ros/rtabmapviz -d /opt/ros/indigo/share/rtabmap_ros/launch/config/rgbd_gui.ini rgb/image:=/kinect2/sd/image_color_rect depth/image:=/kinect2/sd/image_depth_rect rgb/camera_info:=/kinect2/sd/camera_info scan:=/scan odom:=/scanmatch_odom __name:=rtabmapviz __log:=/root/.ros/log/69c33e9c-778e-11e6-a6e6-5c514ffb9c71/rtabmap-rtabmapviz-7.log].
log file: /root/.ros/log/69c33e9c-778e-11e6-a6e6-5c514ffb9c71/rtabmap-rtabmapviz-7*.log
[ INFO] [1473536959.209306251]: rtabmap: Database version = "0.11.8".
[ INFO] [1473536959.332027875]:
/rtabmap/rtabmap subscribed to:
/data_throttled_image,
/data_throttled_image_depth,
/data_throttled_camera_info,
/scanmatch_odom,
/scan
[ INFO] [1473536959.332153542]: rtabmap 0.11.8 started...
^C[points_xyzrgb-8] killing on exit
[rtabmap/rtabmap-6] killing on exit
[hector_mapping-5] killing on exit
[scanmatcher_to_base_footprint-4] killing on exit
[laser_2_base_link-3] killing on exit
[kinect2_2_base_link-2] killing on exit
[urg_node-1] killing on exit
rtabmap: Saving database/long-term memory... (located at /root/.ros/rtabmap.db)
shutting down processing monitor...
| Free forum by Nabble | Edit this page |